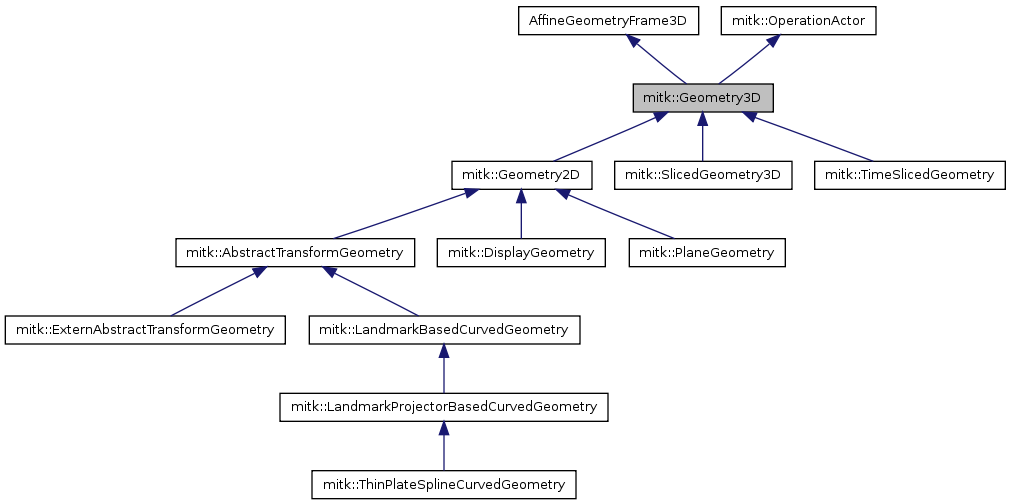
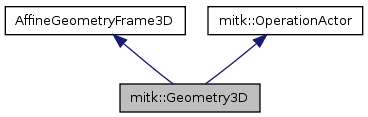
Describes the geometry of a data object. More...
#include <mitkGeometry3D.h>
Public Types | |
| typedef Geometry3D | Self |
| typedef AffineGeometryFrame3D | Superclass |
| typedef itk::SmartPointer< Self > | Pointer |
| typedef itk::SmartPointer < const Self > | ConstPointer |
| typedef itk::QuaternionRigidTransform < ScalarType > | QuaternionTransformType |
| typedef QuaternionTransformType::VnlQuaternionType | VnlQuaternionType |
Public Member Functions | |
| virtual const char * | GetClassName () const |
| Method for creation through the object factory. | |
| virtual AffineTransform3D * | GetIndexToWorldTransform () |
| Get the transformation used to convert from index to world coordinates. | |
| virtual void | SetIndexToWorldTransform (mitk::AffineTransform3D *transform) |
| virtual void | SetIndexToWorldTransformByVtkMatrix (vtkMatrix4x4 *vtkmatrix) |
| Convenience method for setting the ITK transform (m_IndexToWorldTransform) via an vtkMatrix4x4. | |
| virtual const BoundingBoxType * | GetBoundingBox () |
| Get bounding box (in index/unit coordinates) | |
| const BoundsArrayType | GetBounds () const |
| Get bounding box (in index/unit coordinates) as a BoundsArrayType. | |
| virtual void | SetBounds (const BoundsArrayType &bounds) |
| Set the bounding box (in index/unit coordinates) | |
| virtual void | SetFloatBounds (const float bounds[6]) |
| Set the bounding box (in index/unit coordinates) via a float array. | |
| virtual void | SetFloatBounds (const double bounds[6]) |
| Set the bounding box (in index/unit coordinates) via a double array. | |
| virtual const TimeBounds & | GetTimeBounds () |
| Get the time bounds (in ms) | |
| virtual void | SetTimeBounds (const TimeBounds &timebounds) |
| Set the time bounds (in ms) | |
| Point3D | GetCornerPoint (int id) const |
| Get the position of the corner number id (in world coordinates) | |
| Point3D | GetCornerPoint (bool xFront=true, bool yFront=true, bool zFront=true) const |
| Get the position of a corner (in world coordinates) | |
| Vector3D | GetAxisVector (unsigned int direction) const |
| Get vector along bounding-box in the specified direction in mm. | |
| Point3D | GetCenter () const |
| Get the center of the bounding-box in mm. | |
| double | GetDiagonalLength2 () const |
| Get the squared length of the diagonal of the bounding-box in mm. | |
| double | GetDiagonalLength () const |
| Get the length of the diagonal of the bounding-box in mm. | |
| VnlVector | GetMatrixColumn (unsigned int direction) const |
| Get a VnlVector along bounding-box in the specified direction, length is spacing. | |
| ScalarType | GetExtent (unsigned int direction) const |
| Get the extent of the bounding box (in index/unit coordinates) | |
| ScalarType | GetExtentInMM (int direction) const |
| Get the extent of the bounding-box in the specified direction in mm. | |
| virtual void | SetExtentInMM (int direction, ScalarType extentInMM) |
| Set the extent of the bounding-box in the specified direction in mm. | |
| vtkLinearTransform * | GetVtkTransform () const |
| Get the m_IndexToWorldTransform as a vtkLinearTransform. | |
| virtual void | SetOrigin (const Point3D &origin) |
| Set the origin, i.e. the upper-left corner of the plane. | |
| virtual void | Translate (const Vector3D &vector) |
| Translate the origin by a vector. | |
| virtual void | SetIdentity () |
| Set the transform to identity. | |
| virtual void | Compose (const AffineGeometryFrame3D::TransformType *other, bool pre=0) |
| Compose new IndexToWorldTransform with a given transform. | |
| virtual void | Compose (const vtkMatrix4x4 *vtkmatrix, bool pre=0) |
| Compose new IndexToWorldTransform with a given vtkMatrix4x4. | |
| const Point3D & | GetOrigin () const |
| Get the origin, i.e. the upper-left corner of the plane. | |
| VnlVector | GetOriginVnl () const |
| Get the origin as VnlVector. | |
| void | WorldToIndex (const mitk::Point3D &pt_mm, mitk::Point3D &pt_units) const |
| Convert world coordinates (in mm) of a point to (continuous!) index coordinates (in units) | |
| void | IndexToWorld (const mitk::Point3D &pt_units, mitk::Point3D &pt_mm) const |
| Convert index coordinates (in units) of a point to world coordinates (in mm) | |
| void | WorldToIndex (const mitk::Point3D &atPt3d_mm, const mitk::Vector3D &vec_mm, mitk::Vector3D &vec_units) const |
| Convert world coordinates (in mm) of a vector vec_mm (at the point atPt3d_mm) to (continuous!) index coordinates (in units) | |
| void | IndexToWorld (const mitk::Point3D &atPt3d_units, const mitk::Vector3D &vec_units, mitk::Vector3D &vec_mm) const |
| Convert index coordinates (in units) of a vector vec_units (at the point atPt3d_units) to world coordinates (in mm) | |
| template<unsigned int VIndexDimension> | |
| void | WorldToIndex (const mitk::Point3D &pt_mm, itk::Index< VIndexDimension > &index) const |
| Convert world coordinates (in mm) of a point to index coordinates (in units). This method rounds to integer indices! | |
| template<class TCoordRep > | |
| void | WorldToItkPhysicalPoint (const mitk::Point3D &pt_mm, itk::Point< TCoordRep, 3 > &itkPhysicalPoint) const |
| Deprecated for use with ITK version 3.10 or newer. Convert world coordinates (in mm) of a point to ITK physical coordinates (in mm, but without a possible rotation) | |
| template<class TCoordRep > | |
| void | ItkPhysicalPointToWorld (const itk::Point< TCoordRep, 3 > &itkPhysicalPoint, mitk::Point3D &pt_mm) const |
| Deprecated for use with ITK version 3.10 or newer. Convert ITK physical coordinates of a point (in mm, but without a rotation) into MITK world coordinates (in mm) | |
| virtual void | Initialize () |
| Initialize the Geometry3D. | |
| virtual bool | GetImageGeometry () const |
| Is this an ImageGeometry? | |
| virtual void | SetImageGeometry (bool _arg) |
| Define that this Geometry3D is refering to an Image. | |
| virtual void | ImageGeometryOn () |
| virtual void | ImageGeometryOff () |
| virtual bool | IsValid () const |
| Is this Geometry3D in a state that is valid? | |
| bool | IsInside (const mitk::Point3D &p) const |
| Test whether the point p (world coordinates in mm) is inside the bounding box. | |
| bool | IsIndexInside (const mitk::Point3D &index) const |
| Test whether the point p ((continous!)index coordinates in units) is inside the bounding box. | |
| template<unsigned int VIndexDimension> | |
| bool | IsIndexInside (const itk::Index< VIndexDimension > &index) const |
| Convenience method for working with ITK indices. | |
| virtual const mitk::Vector3D & | GetSpacing () |
| Get the spacing (size of a pixel). | |
| const float * | GetFloatSpacing () const |
| Get the spacing as a float[3] array. | |
| virtual void | SetSpacing (const mitk::Vector3D &aSpacing) |
| Set the spacing (m_Spacing) | |
| virtual void | SetSpacing (const float aSpacing[3]) |
| Set the spacing (m_Spacing) via a float array. | |
| virtual unsigned int | GetFrameOfReferenceID () const |
| Get the DICOM FrameOfReferenceID referring to the used world coordinate system. | |
| virtual void | SetFrameOfReferenceID (unsigned int _arg) |
| Set the DICOM FrameOfReferenceID referring to the used world coordinate system. | |
| void | TransferItkToVtkTransform () |
| Copy the ITK transform (m_IndexToWorldTransform) to the VTK transform. | |
| void | TransferVtkToItkTransform () |
| Copy the VTK transform to the ITK transform (m_IndexToWorldTransform) | |
| virtual const BoundingBox * | GetParametricBoundingBox () |
| Get the parametric bounding-box. | |
| const BoundingBox::BoundsArrayType & | GetParametricBounds () const |
| Get the parametric bounds. | |
| mitk::ScalarType | GetParametricExtent (int direction) const |
| Get the parametric extent. | |
| virtual mitk::ScalarType | GetParametricExtentInMM (int direction) const |
| Get the parametric extent in mm. | |
| virtual const Transform3D * | GetParametricTransform () const |
| Get the parametric transform. | |
| mitk::BoundingBox::Pointer | CalculateBoundingBoxRelativeToTransform (const mitk::AffineTransform3D *transform) const |
| Calculates a bounding-box around the geometry relative to a coordinate system defined by a transform. | |
| virtual AffineGeometryFrame3D::Pointer | Clone () const |
| clones the geometry | |
| virtual void | ExecuteOperation (Operation *operation) |
| executes affine operations (translate, rotate, scale) | |
Static Public Member Functions | |
| static Pointer | New () |
Protected Member Functions | |
| Geometry3D () | |
| virtual | ~Geometry3D () |
| virtual void | InitializeGeometry (Self *newGeometry) const |
| used in clone to initialize the newly created geometry | |
| virtual void | PrintSelf (std::ostream &os, itk::Indent indent) const |
| virtual void | BackTransform (const mitk::Point3D &in, mitk::Point3D &out) const |
| virtual void | BackTransform (const mitk::Point3D &at, const mitk::Vector3D &in, mitk::Vector3D &out) const |
| virtual void | SetParametricBounds (const BoundingBox::BoundsArrayType &bounds) |
| Set the parametric bounds. | |
| virtual void | ResetSubTransforms () |
Static Protected Member Functions | |
| static const char * | GetTransformAsString (TransformType *transformType) |
Protected Attributes | |
| mitk::BoundingBox::Pointer | m_ParametricBoundingBox |
| mitk::TimeBounds | m_TimeBounds |
| vtkMatrix4x4 * | m_VtkMatrix |
| bool | m_ImageGeometry |
| mitk::Vector3D | m_Spacing |
| Spacing of the data. Only significant if the geometry describes an Image (m_ImageGeometry==true). | |
| bool | m_Valid |
| unsigned int | m_FrameOfReferenceID |
Static Protected Attributes | |
| static const std::string | INDEX_TO_OBJECT_TRANSFORM |
| static const std::string | OBJECT_TO_NODE_TRANSFORM |
| static const std::string | INDEX_TO_NODE_TRANSFORM |
| static const std::string | INDEX_TO_WORLD_TRANSFORM |
Describes the geometry of a data object.
At least, it can return the bounding box of the data object.
The class holds
Geometry3D and its sub-classes allow converting between intrinsic coordinates (called index or unit coordinates) and world-coordinates (called world or mm coordinates), e.g. WorldToIndex. In case you need integer index coordinates, provide an mitk::Index3D (or itk::Index) as target variable to WorldToIndex, otherwise you will get a continuous index (floating point values).
An important sub-class is SlicedGeometry3D, which descibes data objects consisting of slices, e.g., objects of type Image. Conversions between world coordinates (in mm) and unit coordinates (e.g., pixels in the case of an Image) can be performed.
For more information on related classes, see Geometry Classes.
Geometry3D instances referring to an Image need a slightly different definition of corners, see SetImageGeometry. This is usualy automatically called by Image.
Geometry3D have to be initialized in the method GenerateOutputInformation() of BaseProcess (or CopyInformation/ UpdateOutputInformation of BaseData, if possible, e.g., by analyzing pic tags in Image) subclasses. See also itk::ProcessObject::GenerateOutputInformation(), itk::DataObject::CopyInformation() and itk::DataObject::UpdateOutputInformation().
Rule: everything is in mm (ms) if not stated otherwise.
Definition at line 96 of file mitkGeometry3D.h.
| typedef itk::SmartPointer<const Self> mitk::Geometry3D::ConstPointer |
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::LandmarkBasedCurvedGeometry, mitk::LandmarkProjectorBasedCurvedGeometry, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
Definition at line 99 of file mitkGeometry3D.h.
| typedef itk::SmartPointer<Self> mitk::Geometry3D::Pointer |
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::LandmarkBasedCurvedGeometry, mitk::LandmarkProjectorBasedCurvedGeometry, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
Definition at line 99 of file mitkGeometry3D.h.
| typedef itk::QuaternionRigidTransform< ScalarType > mitk::Geometry3D::QuaternionTransformType |
Definition at line 99 of file mitkGeometry3D.h.
| typedef Geometry3D mitk::Geometry3D::Self |
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::LandmarkBasedCurvedGeometry, mitk::LandmarkProjectorBasedCurvedGeometry, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
Definition at line 99 of file mitkGeometry3D.h.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::LandmarkBasedCurvedGeometry, mitk::LandmarkProjectorBasedCurvedGeometry, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
Definition at line 99 of file mitkGeometry3D.h.
| typedef QuaternionTransformType::VnlQuaternionType mitk::Geometry3D::VnlQuaternionType |
Definition at line 102 of file mitkGeometry3D.h.
| mitk::Geometry3D::Geometry3D | ( | ) | [protected] |
Definition at line 30 of file mitkGeometry3D.cpp.
References Initialize(), m_VtkMatrix, and New().
: m_ParametricBoundingBox(NULL), m_ImageGeometry(false), m_Valid(true), m_FrameOfReferenceID(0), m_IndexToWorldTransformLastModified(0) { FillVector3D(m_FloatSpacing, 1,1,1); m_VtkMatrix = vtkMatrix4x4::New(); m_VtkIndexToWorldTransform = vtkMatrixToLinearTransform::New(); m_VtkIndexToWorldTransform->SetInput(m_VtkMatrix); Initialize(); }
| mitk::Geometry3D::~Geometry3D | ( | ) | [protected, virtual] |
Definition at line 41 of file mitkGeometry3D.cpp.
{
m_VtkMatrix->Delete();
m_VtkIndexToWorldTransform->Delete();
}
| void mitk::Geometry3D::BackTransform | ( | const mitk::Point3D & | in, |
| mitk::Point3D & | out | ||
| ) | const [protected, virtual] |
Definition at line 319 of file mitkGeometry3D.cpp.
References inverse.
{
ScalarType temp[3];
unsigned int i, j;
const TransformType::OffsetType& offset = m_IndexToWorldTransform->GetOffset();
// Remove offset
for (j = 0; j < 3; j++)
{
temp[j] = in[j] - offset[j];
}
// Get WorldToIndex transform
if (m_IndexToWorldTransformLastModified != m_IndexToWorldTransform->GetMTime())
{
m_InvertedTransform = TransformType::New();
if (!m_IndexToWorldTransform->GetInverse( m_InvertedTransform.GetPointer() ))
{
itkExceptionMacro( "Internal ITK matrix inversion error, cannot proceed." );
}
m_IndexToWorldTransformLastModified = m_IndexToWorldTransform->GetMTime();
}
// Check for valid matrix inversion
const TransformType::MatrixType& inverse = m_InvertedTransform->GetMatrix();
if(inverse.GetVnlMatrix().has_nans())
{
itkExceptionMacro( "Internal ITK matrix inversion error, cannot proceed. Matrix was: " << std::endl
<< m_IndexToWorldTransform->GetMatrix() << "Suggested inverted matrix is:" << std::endl
<< inverse );
}
// Transform point
for (i = 0; i < 3; i++)
{
out[i] = 0.0;
for (j = 0; j < 3; j++)
{
out[i] += inverse[i][j]*temp[j];
}
}
}
| void mitk::Geometry3D::BackTransform | ( | const mitk::Point3D & | at, |
| const mitk::Vector3D & | in, | ||
| mitk::Vector3D & | out | ||
| ) | const [protected, virtual] |
Definition at line 362 of file mitkGeometry3D.cpp.
References inverse.
{
// Get WorldToIndex transform
if (m_IndexToWorldTransformLastModified != m_IndexToWorldTransform->GetMTime())
{
m_InvertedTransform = TransformType::New();
if (!m_IndexToWorldTransform->GetInverse( m_InvertedTransform.GetPointer() ))
{
itkExceptionMacro( "Internal ITK matrix inversion error, cannot proceed." );
}
m_IndexToWorldTransformLastModified = m_IndexToWorldTransform->GetMTime();
}
// Check for valid matrix inversion
const TransformType::MatrixType& inverse = m_InvertedTransform->GetMatrix();
if(inverse.GetVnlMatrix().has_nans())
{
itkExceptionMacro( "Internal ITK matrix inversion error, cannot proceed. Matrix was: " << std::endl
<< m_IndexToWorldTransform->GetMatrix() << "Suggested inverted matrix is:" << std::endl
<< inverse );
}
// Transform vector
for (unsigned int i = 0; i < 3; i++)
{
out[i] = 0.0;
for (unsigned int j = 0; j < 3; j++)
{
out[i] += inverse[i][j]*in[j];
}
}
}
| mitk::BoundingBox::Pointer mitk::Geometry3D::CalculateBoundingBoxRelativeToTransform | ( | const mitk::AffineTransform3D * | transform ) | const |
Calculates a bounding-box around the geometry relative to a coordinate system defined by a transform.
Definition at line 209 of file mitkGeometry3D.cpp.
References inverse.
Referenced by mitk::BoundingObjectToSegmentationFilter::GenerateData(), mitk::BaseRenderer::SetCurrentWorldGeometry(), and testExpectedAxisParallelBoundingBox().
{
mitk::BoundingBox::PointsContainer::Pointer pointscontainer=mitk::BoundingBox::PointsContainer::New();
mitk::BoundingBox::PointIdentifier pointid=0;
unsigned char i;
if(transform!=NULL)
{
mitk::AffineTransform3D::Pointer inverse = mitk::AffineTransform3D::New();
transform->GetInverse(inverse);
for(i=0; i<8; ++i)
pointscontainer->InsertElement( pointid++, inverse->TransformPoint( GetCornerPoint(i) ));
}
else
{
for(i=0; i<8; ++i)
pointscontainer->InsertElement( pointid++, GetCornerPoint(i) );
}
mitk::BoundingBox::Pointer result = mitk::BoundingBox::New();
result->SetPoints(pointscontainer);
result->ComputeBoundingBox();
return result;
}
| mitk::AffineGeometryFrame3D::Pointer mitk::Geometry3D::Clone | ( | ) | const [virtual] |
clones the geometry
Overwrite in all sub-classes. Normally looks like:
//## Self::Pointer newGeometry = Self::New(); //## newGeometry->Initialize(); //## InitializeGeometry(newGeometry); //## return newGeometry.GetPointer(); //##
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
Definition at line 170 of file mitkGeometry3D.cpp.
Referenced by mitk::TimeSlicedGeometry::GetGeometry3D(), mitk::GrabItkImageMemory(), mitk::Image::Initialize(), mitk::SlicedGeometry3D::InitializeGeometry(), mitk::RenderingManager::InitializeViews(), mitk::BaseData::SetClonedGeometry(), mitk::PlanesPerpendicularToLinesFilter::SetFrameGeometry(), mitk::AbstractTransformGeometry::SetFrameGeometry(), and mitk::ITKImageImport< TInputImage >::SetGeometry().
{
Self::Pointer newGeometry = Self::New();
newGeometry->Initialize();
InitializeGeometry(newGeometry);
return newGeometry.GetPointer();
}
| void mitk::Geometry3D::Compose | ( | const AffineGeometryFrame3D::TransformType * | other, |
| bool | pre = 0 |
||
| ) | [virtual] |
Compose new IndexToWorldTransform with a given transform.
This method composes m_IndexToWorldTransform with another transform, modifying self to be the composition of self and other. If the argument pre is true, then other is precomposed with self; that is, the resulting transformation consists of first applying other to the source, followed by self. If pre is false or omitted, then other is post-composed with self; that is the resulting transformation consists of first applying self to the source, followed by other.
Definition at line 468 of file mitkGeometry3D.cpp.
References CopySpacingFromTransform().
Referenced by QmitkRigidRegistrationSelectorView::SetOptimizerValue().
{
m_IndexToWorldTransform->Compose(other, pre);
CopySpacingFromTransform(m_IndexToWorldTransform, m_Spacing, m_FloatSpacing);
vtk2itk(m_IndexToWorldTransform->GetOffset(), m_Origin);
Modified();
TransferItkToVtkTransform();
}
| void mitk::Geometry3D::Compose | ( | const vtkMatrix4x4 * | vtkmatrix, |
| bool | pre = 0 |
||
| ) | [virtual] |
Compose new IndexToWorldTransform with a given vtkMatrix4x4.
Converts the vtkMatrix4x4 into a itk-transform and calls the previous method.
Definition at line 477 of file mitkGeometry3D.cpp.
References mitk::TransferVtkMatrixToItkTransform().
{
mitk::AffineGeometryFrame3D::TransformType::Pointer itkTransform = mitk::AffineGeometryFrame3D::TransformType::New();
TransferVtkMatrixToItkTransform(vtkmatrix, itkTransform.GetPointer());
Compose(itkTransform, pre);
}
| void mitk::Geometry3D::ExecuteOperation | ( | Operation * | operation ) | [virtual] |
executes affine operations (translate, rotate, scale)
Implements mitk::OperationActor.
Reimplemented in mitk::PlaneGeometry, mitk::SlicedGeometry3D, and mitk::TimeSlicedGeometry.
Definition at line 237 of file mitkGeometry3D.cpp.
References mitk::RotationOperation::GetAngleOfRotation(), mitk::RotationOperation::GetCenterOfRotation(), mitk::Operation::GetOperationType(), mitk::PointOperation::GetPoint(), mitk::RotationOperation::GetVectorOfRotation(), mitk::OpMOVE, mitk::OpNOTHING, mitk::OpROTATE, and mitk::OpSCALE.
Referenced by mitk::AffineInteractor::ExecuteAction(), mitk::TimeSlicedGeometry::ExecuteOperation(), and mitk::SlicedGeometry3D::ExecuteOperation().
{
vtkTransform *vtktransform = vtkTransform::New();
vtktransform->SetMatrix(m_VtkMatrix);
switch (operation->GetOperationType())
{
case OpNOTHING:
break;
case OpMOVE:
{
mitk::PointOperation *pointOp = dynamic_cast<mitk::PointOperation *>(operation);
if (pointOp == NULL)
{
//mitk::StatusBar::GetInstance()->DisplayText("received wrong type of operation!See mitkAffineInteractor.cpp", 10000);
return;
}
mitk::Point3D newPos = pointOp->GetPoint();
ScalarType data[3];
vtktransform->GetPosition(data);
vtktransform->PostMultiply();
vtktransform->Translate(newPos[0], newPos[1], newPos[2]);
vtktransform->PreMultiply();
break;
}
case OpSCALE:
{
mitk::PointOperation *pointOp = dynamic_cast<mitk::PointOperation *>(operation);
if (pointOp == NULL)
{
//mitk::StatusBar::GetInstance()->DisplayText("received wrong type of operation!See mitkAffineInteractor.cpp", 10000);
return;
}
mitk::Point3D newScale = pointOp->GetPoint();
ScalarType data[3];
/* calculate new scale: newscale = oldscale * (oldscale + scaletoadd)/oldscale */
data[0] = 1 + (newScale[0] / GetMatrixColumn(0).magnitude());
data[1] = 1 + (newScale[1] / GetMatrixColumn(1).magnitude());
data[2] = 1 + (newScale[2] / GetMatrixColumn(2).magnitude());
mitk::Point3D center = const_cast<mitk::BoundingBox*>(m_BoundingBox.GetPointer())->GetCenter();
ScalarType pos[3];
vtktransform->GetPosition(pos);
vtktransform->PostMultiply();
vtktransform->Translate(-pos[0], -pos[1], -pos[2]);
vtktransform->Translate(-center[0], -center[1], -center[2]);
vtktransform->PreMultiply();
vtktransform->Scale(data[0], data[1], data[2]);
vtktransform->PostMultiply();
vtktransform->Translate(+center[0], +center[1], +center[2]);
vtktransform->Translate(pos[0], pos[1], pos[2]);
vtktransform->PreMultiply();
break;
}
case OpROTATE:
{
mitk::RotationOperation *rotateOp = dynamic_cast<mitk::RotationOperation *>(operation);
if (rotateOp == NULL)
{
//mitk::StatusBar::GetInstance()->DisplayText("received wrong type of operation!See mitkAffineInteractor.cpp", 10000);
return;
}
Vector3D rotationVector = rotateOp->GetVectorOfRotation();
Point3D center = rotateOp->GetCenterOfRotation();
ScalarType angle = rotateOp->GetAngleOfRotation();
vtktransform->PostMultiply();
vtktransform->Translate(-center[0], -center[1], -center[2]);
vtktransform->RotateWXYZ(angle, rotationVector[0], rotationVector[1], rotationVector[2]);
vtktransform->Translate(center[0], center[1], center[2]);
vtktransform->PreMultiply();
break;
}
default:
vtktransform->Delete();
return;
}
m_VtkMatrix->DeepCopy(vtktransform->GetMatrix());
TransferVtkToItkTransform();
Modified();
vtktransform->Delete();
}
| Vector3D mitk::Geometry3D::GetAxisVector | ( | unsigned int | direction ) | const [inline] |
Get vector along bounding-box in the specified direction in mm.
The length of the vector is the size of the bounding-box in the specified direction in mm
Definition at line 173 of file mitkGeometry3D.h.
Referenced by compareGeometries(), compareGeometry(), mitk::SegTool2D::DetermineAffectedImageSlice(), mitk::ExtrudedContourInteractor::ExecuteAction(), mitk::AffineInteractor::ExecuteAction(), mitk::ImageMapperGL2D::GenerateData(), mitk::ExtractDirectedPlaneImageFilter::GenerateData(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitkSlicedGeometry3DTest(), mitkTimeSlicedGeometryTest(), mitk::SlicedGeometry3D::ReinitializePlanes(), mitk::SlicedGeometry3D::SetSpacing(), testGeometry(), testGetAxisVectorExtent(), testGetAxisVectorVariants(), and mitk::ImageWriter::WriteByITK().
{
Vector3D frontToBack;
frontToBack.Set_vnl_vector(m_IndexToWorldTransform->GetMatrix().GetVnlMatrix().get_column(direction));
frontToBack *= GetExtent(direction);
return frontToBack;
}
| virtual const BoundingBoxType* mitk::Geometry3D::GetBoundingBox | ( | ) | [virtual] |
Get bounding box (in index/unit coordinates)
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Referenced by mitk::UnstructuredGrid::CalculateBoundingBox(), mitk::Surface::CalculateBoundingBox(), mitk::ImageMapperGL2D::CalculateClippedPlaneBounds(), mitk::ExtractDirectedPlaneImageFilter::CalculateClippedPlaneBounds(), mitk::DataStorage::ComputeBoundingBox(), mitk::DataStorage::ComputeBoundingGeometry3D(), mitk::Image::Initialize(), mitk::RenderingManager::InitializeView(), mitk::Geometry2DDataMapper2D::Paint(), mitk::AbstractTransformGeometry::SetPlane(), mitk::BaseRenderer::SetWorldGeometry(), testExpectedIndexBoundingBox(), testIndexAndWorldConsistency(), and mitk::TimeSlicedGeometry::UpdateInformation().
| const BoundsArrayType mitk::Geometry3D::GetBounds | ( | ) | const [inline] |
Get bounding box (in index/unit coordinates) as a BoundsArrayType.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Definition at line 129 of file mitkGeometry3D.h.
Referenced by PlanarFigureIOTestClass::ComparePlanarFigures(), mitk::VolumeDataVtkMapper3D::GenerateData(), mitk::PlanarFigureWriter::GenerateData(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitk::TimeSlicedGeometry::InitializeEvenlyTimed(), operator==(), and mitk::SlicedGeometry3D::SetSpacing().
{
assert(m_BoundingBox.IsNotNull());
return m_BoundingBox->GetBounds();
}
| Point3D mitk::Geometry3D::GetCenter | ( | ) | const [inline] |
Get the center of the bounding-box in mm.
Definition at line 184 of file mitkGeometry3D.h.
Referenced by mitk::SegTool2D::DetermineAffectedImageSlice(), mitk::AffineInteractor::ExecuteAction(), mitk::BoundingObject::FitGeometry(), and testIndexAndWorldConsistency().
{
assert(m_BoundingBox.IsNotNull());
return m_IndexToWorldTransform->TransformPoint(m_BoundingBox->GetCenter());
}
| virtual const char* mitk::Geometry3D::GetClassName | ( | ) | const [virtual] |
Method for creation through the object factory.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::LandmarkBasedCurvedGeometry, mitk::LandmarkProjectorBasedCurvedGeometry, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
| mitk::Point3D mitk::Geometry3D::GetCornerPoint | ( | int | id ) | const |
Get the position of the corner number id (in world coordinates)
See SetImageGeometry for how a corner is defined on images.
Definition at line 574 of file mitkGeometry3D.cpp.
Referenced by compareGeometry(), mitk::DataStorage::ComputeBoundingBox(), mitk::DataStorage::ComputeBoundingGeometry3D(), mitk::AffineInteractor::ExecuteAction(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), testGeometry(), testGetAxisVectorVariants(), mitk::ContourSet::UpdateOutputInformation(), and mitk::BoundingObjectGroup::UpdateOutputInformation().
{
assert(id >= 0);
assert(m_BoundingBox.IsNotNull());
BoundingBox::BoundsArrayType bounds = m_BoundingBox->GetBounds();
Point3D cornerpoint;
switch(id)
{
case 0: FillVector3D(cornerpoint, bounds[0],bounds[2],bounds[4]); break;
case 1: FillVector3D(cornerpoint, bounds[0],bounds[2],bounds[5]); break;
case 2: FillVector3D(cornerpoint, bounds[0],bounds[3],bounds[4]); break;
case 3: FillVector3D(cornerpoint, bounds[0],bounds[3],bounds[5]); break;
case 4: FillVector3D(cornerpoint, bounds[1],bounds[2],bounds[4]); break;
case 5: FillVector3D(cornerpoint, bounds[1],bounds[2],bounds[5]); break;
case 6: FillVector3D(cornerpoint, bounds[1],bounds[3],bounds[4]); break;
case 7: FillVector3D(cornerpoint, bounds[1],bounds[3],bounds[5]); break;
default:
{
itkExceptionMacro(<<"A cube only has 8 corners. These are labeled 0-7.");
return NULL;
}
}
if(m_ImageGeometry)
{
FillVector3D(cornerpoint, cornerpoint[0]-0.5, cornerpoint[1]-0.5, cornerpoint[2]-0.5);
}
return m_IndexToWorldTransform->TransformPoint(cornerpoint);
}
| mitk::Point3D mitk::Geometry3D::GetCornerPoint | ( | bool | xFront = true, |
| bool | yFront = true, |
||
| bool | zFront = true |
||
| ) | const |
Get the position of a corner (in world coordinates)
See SetImageGeometry for how a corner is defined on images.
Definition at line 605 of file mitkGeometry3D.cpp.
{
assert(m_BoundingBox.IsNotNull());
BoundingBox::BoundsArrayType bounds = m_BoundingBox->GetBounds();
Point3D cornerpoint;
cornerpoint[0] = (xFront ? bounds[0] : bounds[1]);
cornerpoint[1] = (yFront ? bounds[2] : bounds[3]);
cornerpoint[2] = (zFront ? bounds[4] : bounds[5]);
if(m_ImageGeometry)
{
FillVector3D(cornerpoint, cornerpoint[0]-0.5, cornerpoint[1]-0.5, cornerpoint[2]-0.5);
}
return m_IndexToWorldTransform->TransformPoint(cornerpoint);
}
| double mitk::Geometry3D::GetDiagonalLength | ( | ) | const [inline] |
Get the length of the diagonal of the bounding-box in mm.
Definition at line 202 of file mitkGeometry3D.h.
References QuadProgPP::sqrt().
{
return sqrt(GetDiagonalLength2());
}
| double mitk::Geometry3D::GetDiagonalLength2 | ( | ) | const [inline] |
Get the squared length of the diagonal of the bounding-box in mm.
Definition at line 193 of file mitkGeometry3D.h.
{
Vector3D diagonalvector = GetCornerPoint()-GetCornerPoint(false, false, false);
return diagonalvector.GetSquaredNorm();
}
| ScalarType mitk::Geometry3D::GetExtent | ( | unsigned int | direction ) | const |
Get the extent of the bounding box (in index/unit coordinates)
To access the extent in mm use GetExtentInMM
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Referenced by compareGeometry(), mitk::ImageMapperGL2D::GenerateData(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), mitk::Image::Initialize(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitk::SlicedGeometry3D::InitializePlanes(), mitkPicFileReaderTest(), mitk::SlicedData::SetGeometry(), and testGeometry().
| ScalarType mitk::Geometry3D::GetExtentInMM | ( | int | direction ) | const [inline] |
Get the extent of the bounding-box in the specified direction in mm.
Equals length of GetAxisVector(direction).
Definition at line 229 of file mitkGeometry3D.h.
Referenced by compareGeometry(), mitk::AffineInteractor::ExecuteAction(), mitk::BoundingObject::FitGeometry(), mitk::ImageMapperGL2D::GenerateData(), mitk::Cylinder::GetVolume(), mitk::Cuboid::GetVolume(), mitk::Cone::GetVolume(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitk::PlanarFigureMapper2D::Paint(), and testGetAxisVectorExtent().
{
return m_IndexToWorldTransform->GetMatrix().GetVnlMatrix().get_column(direction).magnitude()*GetExtent(direction);
}
| const float * mitk::Geometry3D::GetFloatSpacing | ( | ) | const |
Get the spacing as a float[3] array.
Definition at line 395 of file mitkGeometry3D.cpp.
Referenced by mitk::ImageMapperGL2D::CalculateClippedPlaneBounds(), mitk::ExtractDirectedPlaneImageFilter::CalculateClippedPlaneBounds(), and mitk::LabeledImageToSurfaceFilter::GetVolumeForLabel().
{
return m_FloatSpacing;
}
| virtual unsigned int mitk::Geometry3D::GetFrameOfReferenceID | ( | ) | const [virtual] |
Get the DICOM FrameOfReferenceID referring to the used world coordinate system.
Referenced by mitk::SlicedGeometry3D::InitializeEvenlySpaced(), and mitk::TimeSlicedGeometry::InitializeEvenlyTimed().
| virtual bool mitk::Geometry3D::GetImageGeometry | ( | ) | const [virtual] |
Is this an ImageGeometry?
For more information, see SetImageGeometry
Referenced by mitk::ImageMapperGL2D::CalculateClippedPlaneBounds(), mitk::ExtractDirectedPlaneImageFilter::CalculateClippedPlaneBounds(), mitk::BoundingObject::FitGeometry(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitk::TimeSlicedGeometry::InitializeEvenlyTimed(), and mitk::Geometry2DDataMapper2D::Paint().
| virtual AffineTransform3D* mitk::Geometry3D::GetIndexToWorldTransform | ( | ) | [virtual] |
Get the transformation used to convert from index to world coordinates.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Referenced by PlanarFigureIOTestClass::ComparePlanarFigures(), mitk::DataStorage::ComputeBoundingGeometry3D(), mitk::BoundingObject::FitGeometry(), mitk::PlanarFigureWriter::GenerateData(), mitk::PicFileWriter::GenerateData(), mitk::NavigationDataObjectVisualizationFilter::GenerateData(), mitk::ItkImageFileReader::GenerateData(), mitk::BoundingObjectToSegmentationFilter::GenerateData(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), mitk::GetRotation(), mitk::GetWorldToItkPhysicalTransform(), mitk::Image::Initialize(), mitk::Image::InitializeByItk(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitk::TimeSlicedGeometry::InitializeEvenlyTimed(), mitk::Image::IsRotated(), mitkPicFileReaderTest(), mitkSlicedGeometry3DTest(), operator==(), mitk::Geometry2DDataMapper2D::Paint(), QmitkRigidRegistrationSelectorView::SetOptimizerValue(), testSurfaceBoundingBoxConsistency(), and mitk::TimeSlicedGeometry::UpdateInformation().
| VnlVector mitk::Geometry3D::GetMatrixColumn | ( | unsigned int | direction ) | const [inline] |
Get a VnlVector along bounding-box in the specified direction, length is spacing.
Definition at line 212 of file mitkGeometry3D.h.
Referenced by mitk::PlaneGeometry::Angle(), and mitk::PlaneGeometry::IntersectionPoint().
{
return m_IndexToWorldTransform->GetMatrix().GetVnlMatrix().get_column(direction);
}
| const Point3D& mitk::Geometry3D::GetOrigin | ( | ) | const [inline] |
Get the origin, i.e. the upper-left corner of the plane.
Definition at line 283 of file mitkGeometry3D.h.
Referenced by compareGeometries(), PlanarFigureIOTestClass::ComparePlanarFigures(), mitk::PlanarFigureWriter::GenerateData(), mitk::PadImageFilter::GenerateData(), mitk::ImageMapperGL2D::GenerateData(), mitk::ExtractDirectedPlaneImageFilter::GenerateData(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), mitk::OdfVtkMapper2D< TPixelType, NrOdfDirections >::MeasureDisplayedGeometry(), mitkSlicedGeometry3DTest(), mitkTimeSlicedGeometryTest(), mitk::VectorImageMapper2D::Paint(), mitk::UnstructuredGridMapper2D::Paint(), mitk::PolyDataGLMapper2D::Paint(), QmitkMeasurement::PlanarFigureSelectionChanged(), mitk::PlaneGeometry::ProjectPointOntoPlane(), mitk::SlicedGeometry3D::ReinitializePlanes(), mitk::VolumeDataVtkMapper3D::SetClippingPlane(), mitk::SlicedGeometry3D::SetSpacing(), mitk::PlaneGeometry::SignedDistanceFromPlane(), testIndexAndWorldConsistency(), and mitk::ImageWriter::WriteByITK().
{
return m_Origin;
}
| VnlVector mitk::Geometry3D::GetOriginVnl | ( | ) | const [inline] |
Get the origin as VnlVector.
Definition at line 292 of file mitkGeometry3D.h.
{
return const_cast<Self*>(this)->m_Origin.Get_vnl_vector();
}
| virtual const BoundingBox* mitk::Geometry3D::GetParametricBoundingBox | ( | ) | [virtual] |
Get the parametric bounding-box.
See AbstractTransformGeometry for an example usage of this.
| const BoundingBox::BoundsArrayType& mitk::Geometry3D::GetParametricBounds | ( | ) | const [inline] |
Get the parametric bounds.
See AbstractTransformGeometry for an example usage of this.
Definition at line 531 of file mitkGeometry3D.h.
{
assert(m_ParametricBoundingBox.IsNotNull());
return m_ParametricBoundingBox->GetBounds();
}
| mitk::ScalarType mitk::Geometry3D::GetParametricExtent | ( | int | direction ) | const [inline] |
Get the parametric extent.
See AbstractTransformGeometry for an example usage of this.
Definition at line 541 of file mitkGeometry3D.h.
Referenced by mitk::ImageMapperGL2D::GenerateData(), and mitk::ExtractDirectedPlaneImageFilter::GenerateData().
{
assert(direction>=0 && direction<3);
assert(m_ParametricBoundingBox.IsNotNull());
BoundingBoxType::BoundsArrayType bounds = m_ParametricBoundingBox->GetBounds();
return bounds[direction*2+1]-bounds[direction*2];
}
| virtual mitk::ScalarType mitk::Geometry3D::GetParametricExtentInMM | ( | int | direction ) | const [inline, virtual] |
Get the parametric extent in mm.
See AbstractTransformGeometry for an example usage of this.
Reimplemented in mitk::AbstractTransformGeometry.
Definition at line 554 of file mitkGeometry3D.h.
{
return GetExtentInMM(direction);
}
| virtual const Transform3D* mitk::Geometry3D::GetParametricTransform | ( | ) | const [inline, virtual] |
Get the parametric transform.
See AbstractTransformGeometry for an example usage of this.
Reimplemented in mitk::AbstractTransformGeometry.
Definition at line 563 of file mitkGeometry3D.h.
{
return m_IndexToWorldTransform;
}
| virtual const mitk::Vector3D& mitk::Geometry3D::GetSpacing | ( | ) | [virtual] |
Get the spacing (size of a pixel).
Referenced by mitk::ImageMapperGL2D::CalculateSpacing(), compareGeometries(), PlanarFigureIOTestClass::ComparePlanarFigures(), QmitkImageStatistics::FillStatisticsTableView(), mitk::BoundingObject::FitGeometry(), mitk::PlanarFigureWriter::GenerateData(), mitk::PicFileWriter::GenerateData(), mitk::PadImageFilter::GenerateData(), mitk::NavigationDataObjectVisualizationFilter::GenerateData(), mitk::GetRotation(), mitk::SlicedGeometry3D::InitializePlanes(), mitkPicFileReaderTest(), mitk::ImageMapperGL2D::Paint(), mitk::PicHelper::SetGeometry2D(), mitk::PicHelper::SetSpacing(), testIndexAndWorldConsistency(), and mitk::ImageWriter::WriteByITK().
| virtual const TimeBounds& mitk::Geometry3D::GetTimeBounds | ( | ) | [virtual] |
Get the time bounds (in ms)
Referenced by mitk::DataStorage::ComputeBoundingGeometry3D(), mitk::DataStorage::ComputeTimeBounds(), mitk::TimeSlicedGeometry::CopyTimes(), mitk::CoordinateSupplier::ExecuteAction(), mitk::TimeSlicedGeometry::ExpandToNumberOfTimeSteps(), mitk::UnstructuredGridVtkWriter< VTKWRITER >::GenerateData(), mitk::SurfaceVtkWriter< VTKWRITER >::GenerateData(), mitk::ImageWriter::GenerateData(), mitk::VectorImageMapper2D::GetCurrentTimeStep(), mitk::TimeSlicedGeometry::GetGeometry3D(), mitk::SlicedGeometry3D::InitializeEvenlySpaced(), mitkPicFileReaderTest(), mitkTimeSlicedGeometryTest(), mitk::SurfaceGLMapper2D::Paint(), mitk::PointSetGLMapper2D::Paint(), mitk::MeshMapper2D::Paint(), and mitk::TimeSlicedGeometry::UpdateInformation().
| const char * mitk::Geometry3D::GetTransformAsString | ( | TransformType * | transformType ) | [static, protected] |
Definition at line 484 of file mitkGeometry3D.cpp.
{
static char buffer[255];
for ( int j=0; j<255; j++) buffer[j] = '\0';
ostrstream out( buffer, 255 );
out << '[';
for( int i=0; i<3; ++i )
{
out << '[';
for( int j=0; j<3; ++j )
out << transformType->GetMatrix().GetVnlMatrix().get(i, j) << ' ';
out << ']';
}
out << "][";
for( int i=0; i<3; ++i )
out << transformType->GetOffset()[i] << ' ';
out << "]\0";
return buffer;
}
| vtkLinearTransform* mitk::Geometry3D::GetVtkTransform | ( | ) | const [inline] |
Get the m_IndexToWorldTransform as a vtkLinearTransform.
Definition at line 242 of file mitkGeometry3D.h.
Referenced by mitk::ImageMapperGL2D::CalculateClippedPlaneBounds(), mitk::ExtractDirectedPlaneImageFilter::CalculateClippedPlaneBounds(), mitk::AffineInteractor::ExecuteAction(), mitk::UnstructuredGridVtkWriter< VTKWRITER >::GenerateData(), mitk::SurfaceVtkWriter< VTKWRITER >::GenerateData(), mitk::ImageMapperGL2D::GenerateData(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), mitk::DataNode::GetVtkTransform(), and mitk::SurfaceToImageFilter::Stencil3DImage().
{
return (vtkLinearTransform*)m_VtkIndexToWorldTransform;
}
| virtual void mitk::Geometry3D::ImageGeometryOff | ( | ) | [virtual] |
| virtual void mitk::Geometry3D::ImageGeometryOn | ( | ) | [virtual] |
| void mitk::Geometry3D::IndexToWorld | ( | const mitk::Point3D & | pt_units, |
| mitk::Point3D & | pt_mm | ||
| ) | const |
Convert index coordinates (in units) of a point to world coordinates (in mm)
Definition at line 143 of file mitkGeometry3D.cpp.
Referenced by mitk::PlaneCutFilter::_computeIntersection(), mitk::ContourUtils::BackProjectContourFrom2DSlice(), mitk::CutImageWithOutputTypeSelect(), mitk::SurfaceIndexToWorldTransformFilter::GenerateData(), mitk::BoundingObjectToSegmentationFilter::GenerateData(), mitk::Image::Initialize(), mitk::PicHelper::SetGeometry2D(), testIndexAndWorldConsistency(), and QmitkVtkLineProfileWidget::UpdateItemModelFromPath().
{
pt_mm = m_IndexToWorldTransform->TransformPoint(pt_units);
}
| void mitk::Geometry3D::IndexToWorld | ( | const mitk::Point3D & | atPt3d_units, |
| const mitk::Vector3D & | vec_units, | ||
| mitk::Vector3D & | vec_mm | ||
| ) | const |
Convert index coordinates (in units) of a vector vec_units (at the point atPt3d_units) to world coordinates (in mm)
Definition at line 153 of file mitkGeometry3D.cpp.
{
vec_mm = m_IndexToWorldTransform->TransformVector(vec_units);
}
| void mitk::Geometry3D::Initialize | ( | ) | [virtual] |
Initialize the Geometry3D.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, and mitk::PlaneGeometry.
Definition at line 62 of file mitkGeometry3D.cpp.
References CopySpacingFromTransform(), and QuadProgPP::max().
Referenced by mitk::PlaneGeometry::EnsurePerpendicularNormal(), Geometry3D(), and mitk::SlicedGeometry3D::SlicedGeometry3D().
{
float b[6] = {0,1,0,1,0,1};
SetFloatBounds(b);
m_IndexToObjectTransform = TransformType::New();
m_ObjectToNodeTransform = TransformType::New();
if(m_IndexToWorldTransform.IsNull())
m_IndexToWorldTransform = TransformType::New();
else
m_IndexToWorldTransform->SetIdentity();
CopySpacingFromTransform(m_IndexToWorldTransform, m_Spacing, m_FloatSpacing);
vtk2itk(m_IndexToWorldTransform->GetOffset(), m_Origin);
m_VtkMatrix->Identity();
m_TimeBounds[0]=ScalarTypeNumericTraits::NonpositiveMin(); m_TimeBounds[1]=ScalarTypeNumericTraits::max();
m_FrameOfReferenceID = 0;
m_ImageGeometry = false;
}
| void mitk::Geometry3D::InitializeGeometry | ( | Self * | newGeometry ) | const [protected, virtual] |
used in clone to initialize the newly created geometry
Has to be overwritten in sub-classes, if they add members. Do the following:
Reimplemented in mitk::SlicedGeometry3D, and mitk::TimeSlicedGeometry.
Definition at line 178 of file mitkGeometry3D.cpp.
References m_ImageGeometry, SetFrameOfReferenceID(), and SetTimeBounds().
{
Superclass::InitializeGeometry(newGeometry);
newGeometry->SetTimeBounds(m_TimeBounds);
//newGeometry->GetVtkTransform()->SetMatrix(m_VtkIndexToWorldTransform->GetMatrix()); IW
//newGeometry->TransferVtkToItkTransform(); //MH
newGeometry->SetFrameOfReferenceID(GetFrameOfReferenceID());
newGeometry->m_ImageGeometry = m_ImageGeometry;
}
| bool mitk::Geometry3D::IsIndexInside | ( | const mitk::Point3D & | index ) | const [inline] |
Test whether the point p ((continous!)index coordinates in units) is inside the bounding box.
Definition at line 439 of file mitkGeometry3D.h.
Referenced by mitk::SetRegionTool::OnMousePressed(), mitk::RegionGrowingTool::OnMousePressed(), mitk::RegionGrowingTool::OnMousePressedOutside(), and mitk::ContourUtils::ProjectContourTo2DSlice().
{
bool inside = false;
//if it is an image geometry, we need to convert the index to discrete values
//this is done by applying the rounding function also used in WorldToIndex (see line 323)
if (m_ImageGeometry)
{
mitk::Point3D discretIndex;
discretIndex[0]=itk::Math::RoundHalfIntegerUp( index[0] );
discretIndex[1]=itk::Math::RoundHalfIntegerUp( index[1] );
discretIndex[2]=itk::Math::RoundHalfIntegerUp( index[2] );
inside = m_BoundingBox->IsInside(discretIndex);
//we have to check if the index is at the upper border of each dimension,
// because the boundingbox is not centerbased
if (inside)
{
const BoundingBox::BoundsArrayType& bounds = m_BoundingBox->GetBounds();
if((discretIndex[0] == bounds[1]) ||
(discretIndex[1] == bounds[3]) ||
(discretIndex[2] == bounds[5]))
inside = false;
}
}
else
inside = m_BoundingBox->IsInside(index);
return inside;
}
| bool mitk::Geometry3D::IsIndexInside | ( | const itk::Index< VIndexDimension > & | index ) | const [inline] |
Convenience method for working with ITK indices.
Definition at line 472 of file mitkGeometry3D.h.
{
int i, dim=index.GetIndexDimension();
Point3D pt_index;
pt_index.Fill(0);
for ( i = 0; i < dim; ++i )
{
pt_index[i] = index[i];
}
return IsIndexInside(pt_index);
}
| bool mitk::Geometry3D::IsInside | ( | const mitk::Point3D & | p ) | const [inline] |
Test whether the point p (world coordinates in mm) is inside the bounding box.
Definition at line 429 of file mitkGeometry3D.h.
Referenced by mitk::AffineInteractor::CheckSelected(), mitk::MoveSurfaceInteractor::ExecuteAction(), and QmitkRegionGrowingView::ItkImageProcessing().
{
mitk::Point3D index;
WorldToIndex(p, index);
return IsIndexInside(index);
}
| virtual bool mitk::Geometry3D::IsValid | ( | ) | const [inline, virtual] |
Is this Geometry3D in a state that is valid?
Reimplemented in mitk::DisplayGeometry, and mitk::ThinPlateSplineCurvedGeometry.
Definition at line 421 of file mitkGeometry3D.h.
Referenced by mitk::ImageMapperGL2D::GenerateData(), mitk::PlanesPerpendicularToLinesFilter::SetFrameGeometry(), and mitk::AbstractTransformGeometry::SetFrameGeometry().
{
return m_Valid;
}
| void mitk::Geometry3D::ItkPhysicalPointToWorld | ( | const itk::Point< TCoordRep, 3 > & | itkPhysicalPoint, |
| mitk::Point3D & | pt_mm | ||
| ) | const [inline] |
Deprecated for use with ITK version 3.10 or newer. Convert ITK physical coordinates of a point (in mm, but without a rotation) into MITK world coordinates (in mm)
For more information, see WorldToItkPhysicalPoint.
Definition at line 379 of file mitkGeometry3D.h.
{
#if ((ITK_VERSION_MAJOR > 3) || (ITK_VERSION_MAJOR == 3 && ITK_VERSION_MINOR > 8))
mitk::vtk2itk(itkPhysicalPoint, pt_mm);
#else
mitk::Point3D index;
for (unsigned int i = 0 ; i < 3 ; i++)
{
index[i] = static_cast<ScalarType>( (itkPhysicalPoint[i]- this->m_Origin[i]) / this->m_Spacing[i] );
}
IndexToWorld(index, pt_mm);
#endif
}
| static Pointer mitk::Geometry3D::New | ( | ) | [static] |
Method for creation through the object factory.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Reimplemented in mitk::AbstractTransformGeometry, mitk::DisplayGeometry, mitk::Geometry2D, mitk::PlaneGeometry, mitk::SlicedGeometry3D, mitk::ThinPlateSplineCurvedGeometry, mitk::TimeSlicedGeometry, and mitk::ExternAbstractTransformGeometry.
Referenced by mitk::SlicedGeometry3D::AdjustNormal(), mitk::DataStorage::ComputeBoundingGeometry3D(), mitk::ProbeFilter::GenerateOutputInformation(), Geometry3D(), mitk::TimeSlicedGeometry::Initialize(), mitk::BaseData::InitializeTimeSlicedGeometry(), main(), mitkBaseDataTest(), mitkPlaneFitTest(), mitkSliceNavigationControllerTest(), mitkTimeSlicedGeometryTest(), and testGeometry3D().
| void mitk::Geometry3D::PrintSelf | ( | std::ostream & | os, |
| itk::Indent | indent | ||
| ) | const [protected, virtual] |
Reimplemented in mitk::DisplayGeometry, mitk::Geometry2D, mitk::PlaneGeometry, mitk::SlicedGeometry3D, and mitk::TimeSlicedGeometry.
Definition at line 510 of file mitkGeometry3D.cpp.
{
os << indent << " IndexToWorldTransform: ";
if(m_IndexToWorldTransform.IsNull())
os << "NULL" << std::endl;
else
{
// from itk::MatrixOffsetTransformBase
unsigned int i, j;
os << std::endl;
os << indent << "Matrix: " << std::endl;
for (i = 0; i < 3; i++)
{
os << indent.GetNextIndent();
for (j = 0; j < 3; j++)
{
os << m_IndexToWorldTransform->GetMatrix()[i][j] << " ";
}
os << std::endl;
}
os << indent << "Offset: " << m_IndexToWorldTransform->GetOffset() << std::endl;
os << indent << "Center: " << m_IndexToWorldTransform->GetCenter() << std::endl;
os << indent << "Translation: " << m_IndexToWorldTransform->GetTranslation() << std::endl;
os << indent << "Inverse: " << std::endl;
for (i = 0; i < 3; i++)
{
os << indent.GetNextIndent();
for (j = 0; j < 3; j++)
{
os << m_IndexToWorldTransform->GetInverseMatrix()[i][j] << " ";
}
os << std::endl;
}
// from itk::ScalableAffineTransform
os << indent << "Scale : ";
for (i = 0; i < 3; i++)
{
os << m_IndexToWorldTransform->GetScale()[i] << " ";
}
os << std::endl;
}
os << indent << " BoundingBox: ";
if(m_BoundingBox.IsNull())
os << "NULL" << std::endl;
else
{
os << indent << "( ";
for (unsigned int i=0; i<3; i++)
{
os << m_BoundingBox->GetBounds()[2*i] << "," << m_BoundingBox->GetBounds()[2*i+1] << " ";
}
os << " )" << std::endl;
}
os << indent << " Origin: " << m_Origin << std::endl;
os << indent << " ImageGeometry: " << m_ImageGeometry << std::endl;
os << indent << " Spacing: " << m_Spacing << std::endl;
os << indent << " TimeBounds: " << m_TimeBounds << std::endl;
}
| void mitk::Geometry3D::ResetSubTransforms | ( | ) | [protected, virtual] |
Resets sub-transforms that compose m_IndexToWorldTransform, by using the current value of m_IndexToWorldTransform and setting the rotation component to zero.
Definition at line 623 of file mitkGeometry3D.cpp.
{
}
| virtual void mitk::Geometry3D::SetBounds | ( | const BoundsArrayType & | bounds ) | [virtual] |
Set the bounding box (in index/unit coordinates)
Only possible via the BoundsArray to make clear that a copy of the bounding-box is stored, not a reference to it.
Reimplemented from itk::AffineGeometryFrame< TScalarType, NDimensions >.
Referenced by mitk::BoundingObject::BoundingObject(), mitk::Image::Initialize(), mitk::ContourSet::UpdateOutputInformation(), mitk::Contour::UpdateOutputInformation(), and mitk::BoundingObjectGroup::UpdateOutputInformation().
| void mitk::Geometry3D::SetExtentInMM | ( | int | direction, |
| ScalarType | extentInMM | ||
| ) | [virtual] |
Set the extent of the bounding-box in the specified direction in mm.
Reimplemented in mitk::Geometry2D.
Definition at line 191 of file mitkGeometry3D.cpp.
References matrix().
{
ScalarType len = GetExtentInMM(direction);
if(fabs(len - extentInMM)>=mitk::eps)
{
AffineTransform3D::MatrixType::InternalMatrixType vnlmatrix;
vnlmatrix = m_IndexToWorldTransform->GetMatrix().GetVnlMatrix();
if(len>extentInMM)
vnlmatrix.set_column(direction, vnlmatrix.get_column(direction)/len*extentInMM);
else
vnlmatrix.set_column(direction, vnlmatrix.get_column(direction)*extentInMM/len);
Matrix3D matrix;
matrix = vnlmatrix;
m_IndexToWorldTransform->SetMatrix(matrix);
Modified();
}
}
| void mitk::Geometry3D::SetFloatBounds | ( | const float | bounds[6] ) | [virtual] |
Set the bounding box (in index/unit coordinates) via a float array.
Definition at line 115 of file mitkGeometry3D.cpp.
Referenced by mitk::UnstructuredGrid::CalculateBoundingBox(), and mitk::Surface::CalculateBoundingBox().
{
mitk::BoundingBox::BoundsArrayType b;
const float *input = bounds;
int i=0;
for(mitk::BoundingBox::BoundsArrayType::Iterator it = b.Begin(); i < 6 ;++i) *it++ = (mitk::ScalarType)*input++;
SetBoundsArray(b, m_BoundingBox);
}
| void mitk::Geometry3D::SetFloatBounds | ( | const double | bounds[6] ) | [virtual] |
Set the bounding box (in index/unit coordinates) via a double array.
Definition at line 124 of file mitkGeometry3D.cpp.
{
mitk::BoundingBox::BoundsArrayType b;
const double *input = bounds;
int i=0;
for(mitk::BoundingBox::BoundsArrayType::Iterator it = b.Begin(); i < 6 ;++i) *it++ = (mitk::ScalarType)*input++;
SetBoundsArray(b, m_BoundingBox);
}
| virtual void mitk::Geometry3D::SetFrameOfReferenceID | ( | unsigned int | _arg ) | [virtual] |
Set the DICOM FrameOfReferenceID referring to the used world coordinate system.
Referenced by InitializeGeometry().
| void mitk::Geometry3D::SetIdentity | ( | ) | [virtual] |
Set the transform to identity.
Definition at line 460 of file mitkGeometry3D.cpp.
{
m_IndexToWorldTransform->SetIdentity();
m_Origin.Fill(0);
Modified();
TransferItkToVtkTransform();
}
| virtual void mitk::Geometry3D::SetImageGeometry | ( | bool | _arg ) | [virtual] |
Define that this Geometry3D is refering to an Image.
A geometry referring to an Image needs a slightly different definition of the position of the corners (see GetCornerPoint). The position of a voxel is defined by the position of its center. If we would use the origin (position of the (center of) the first voxel) as a corner and display this point, it would seem to be not at the corner but a bit within the image. Even worse for the opposite corner of the image: here the corner would appear outside the image (by half of the voxel diameter). Thus, we have to correct for this and to be able to do that, we need to know that the Geometry3D is referring to an Image.
Reimplemented in mitk::SlicedGeometry3D, and mitk::TimeSlicedGeometry.
Referenced by mitk::TimeSlicedGeometry::SetImageGeometry(), and mitk::SlicedGeometry3D::SetImageGeometry().
| void mitk::Geometry3D::SetIndexToWorldTransform | ( | mitk::AffineTransform3D * | transform ) | [virtual] |
Reimplemented in mitk::Geometry2D, and mitk::PlaneGeometry.
Definition at line 158 of file mitkGeometry3D.cpp.
References CopySpacingFromTransform().
Referenced by mitk::BoundingObjectGroup::BoundingObjectGroup(), mitk::NavigationDataObjectVisualizationFilter::GenerateData(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), mitk::TimeSlicedGeometry::UpdateInformation(), mitk::ContourSet::UpdateOutputInformation(), and mitk::BoundingObjectGroup::UpdateOutputInformation().
{
if(m_IndexToWorldTransform.GetPointer() != transform)
{
Superclass::SetIndexToWorldTransform(transform);
CopySpacingFromTransform(m_IndexToWorldTransform, m_Spacing, m_FloatSpacing);
vtk2itk(m_IndexToWorldTransform->GetOffset(), m_Origin);
TransferItkToVtkTransform();
Modified();
}
}
| void mitk::Geometry3D::SetIndexToWorldTransformByVtkMatrix | ( | vtkMatrix4x4 * | vtkmatrix ) | [virtual] |
Convenience method for setting the ITK transform (m_IndexToWorldTransform) via an vtkMatrix4x4.
Definition at line 100 of file mitkGeometry3D.cpp.
Referenced by QmitkRigidRegistrationSelectorView::SetOptimizerValue().
{
m_VtkMatrix->DeepCopy(vtkmatrix);
TransferVtkToItkTransform();
}
| void mitk::Geometry3D::SetOrigin | ( | const Point3D & | origin ) | [virtual] |
Set the origin, i.e. the upper-left corner of the plane.
Definition at line 439 of file mitkGeometry3D.cpp.
Referenced by mitk::PlanesPerpendicularToLinesFilter::GenerateData(), mitk::ItkImageFileReader::GenerateData(), mitk::Geometry2DDataToSurfaceFilter::GenerateOutputInformation(), mitk::AutoCropImageFilter::GenerateOutputInformation(), mitk::SlicedGeometry3D::GetGeometry2D(), mitk::Image::Initialize(), mitk::Image::InitializeByItk(), and mitk::SlicedGeometry3D::ReinitializePlanes().
{
if(origin!=GetOrigin())
{
m_Origin = origin;
m_IndexToWorldTransform->SetOffset(m_Origin.GetVectorFromOrigin());
Modified();
TransferItkToVtkTransform();
}
}
| void mitk::Geometry3D::SetParametricBounds | ( | const BoundingBox::BoundsArrayType & | bounds ) | [protected, virtual] |
Set the parametric bounds.
Protected in this class, made public in some sub-classes, e.g., ExternAbstractTransformGeometry.
Reimplemented in mitk::ExternAbstractTransformGeometry.
Definition at line 133 of file mitkGeometry3D.cpp.
Referenced by mitk::AbstractTransformGeometry::InitializeGeometry().
{
SetBoundsArray(bounds, m_ParametricBoundingBox);
}
| void mitk::Geometry3D::SetSpacing | ( | const mitk::Vector3D & | aSpacing ) | [virtual] |
Set the spacing (m_Spacing)
Reimplemented in mitk::SlicedGeometry3D.
Definition at line 409 of file mitkGeometry3D.cpp.
References matrix().
Referenced by mitk::NavigationDataObjectVisualizationFilter::GenerateData(), and mitk::SlicedGeometry3D::InitializeGeometry().
{
if(mitk::Equal(m_Spacing, aSpacing) == false)
{
assert(aSpacing[0]>0 && aSpacing[1]>0 && aSpacing[2]>0);
m_Spacing = aSpacing;
AffineTransform3D::MatrixType::InternalMatrixType vnlmatrix;
vnlmatrix = m_IndexToWorldTransform->GetMatrix().GetVnlMatrix();
mitk::VnlVector col;
col = vnlmatrix.get_column(0); col.normalize(); col*=aSpacing[0]; vnlmatrix.set_column(0, col);
col = vnlmatrix.get_column(1); col.normalize(); col*=aSpacing[1]; vnlmatrix.set_column(1, col);
col = vnlmatrix.get_column(2); col.normalize(); col*=aSpacing[2]; vnlmatrix.set_column(2, col);
Matrix3D matrix;
matrix = vnlmatrix;
AffineTransform3D::Pointer transform = AffineTransform3D::New();
transform->SetMatrix(matrix);
transform->SetOffset(m_IndexToWorldTransform->GetOffset());
SetIndexToWorldTransform(transform.GetPointer());
itk2vtk(m_Spacing, m_FloatSpacing);
}
}
| void mitk::Geometry3D::SetSpacing | ( | const float | aSpacing[3] ) | [virtual] |
Set the spacing (m_Spacing) via a float array.
Definition at line 400 of file mitkGeometry3D.cpp.
{
mitk::Vector3D tmp;
tmp[0]= aSpacing[0];
tmp[1]= aSpacing[1];
tmp[2]= aSpacing[2];
SetSpacing(tmp);
}
| void mitk::Geometry3D::SetTimeBounds | ( | const TimeBounds & | timebounds ) | [virtual] |
Set the time bounds (in ms)
Reimplemented in mitk::SlicedGeometry3D.
Definition at line 106 of file mitkGeometry3D.cpp.
Referenced by mitk::TimeSlicedGeometry::CopyTimes(), InitializeGeometry(), and mitkTimeSlicedGeometryTest().
{
if(m_TimeBounds != timebounds)
{
m_TimeBounds = timebounds;
Modified();
}
}
| void mitk::Geometry3D::TransferItkToVtkTransform | ( | ) |
Copy the ITK transform (m_IndexToWorldTransform) to the VTK transform.
Definition at line 86 of file mitkGeometry3D.cpp.
References mitk::TransferItkTransformToVtkMatrix().
Referenced by mitk::UnstructuredGridVtkWriter< VTKWRITER >::GenerateData(), mitk::SurfaceVtkWriter< VTKWRITER >::GenerateData(), mitk::NavigationDataObjectVisualizationFilter::GenerateData(), and mitk::SurfaceToImageFilter::Stencil3DImage().
{
// copy m_IndexToWorldTransform into m_VtkIndexToWorldTransform
TransferItkTransformToVtkMatrix(m_IndexToWorldTransform.GetPointer(), m_VtkMatrix);
m_VtkIndexToWorldTransform->Modified();
}
| void mitk::Geometry3D::TransferVtkToItkTransform | ( | ) |
Copy the VTK transform to the ITK transform (m_IndexToWorldTransform)
Definition at line 93 of file mitkGeometry3D.cpp.
References CopySpacingFromTransform(), and mitk::TransferVtkMatrixToItkTransform().
{
TransferVtkMatrixToItkTransform(m_VtkMatrix, m_IndexToWorldTransform.GetPointer());
CopySpacingFromTransform(m_IndexToWorldTransform, m_Spacing, m_FloatSpacing);
vtk2itk(m_IndexToWorldTransform->GetOffset(), m_Origin);
}
| void mitk::Geometry3D::Translate | ( | const Vector3D & | vector ) | [virtual] |
Translate the origin by a vector.
Definition at line 450 of file mitkGeometry3D.cpp.
Referenced by mitk::MoveSurfaceInteractor::ExecuteAction().
{
if((vector[0] != 0) || (vector[1] != 0) || (vector[2] != 0))
{
m_IndexToWorldTransform->SetOffset(m_IndexToWorldTransform->GetOffset()+vector);
TransferItkToVtkTransform();
Modified();
}
}
| void mitk::Geometry3D::WorldToIndex | ( | const mitk::Point3D & | pt_mm, |
| mitk::Point3D & | pt_units | ||
| ) | const |
Convert world coordinates (in mm) of a point to (continuous!) index coordinates (in units)
Definition at line 138 of file mitkGeometry3D.cpp.
Referenced by mitk::PlaneCutFilter::_computeIntersection(), QmitkVtkLineProfileWidget::CreatePathFromPlanarFigure(), mitk::SegTool2D::DetermineAffectedImageSlice(), mitk::PointSet::ExecuteOperation(), mitk::ImageMapperGL2D::GenerateData(), mitk::PointSet::InsertPoint(), QmitkRegionGrowingView::ItkImageProcessing(), mitk::PaintbrushTool::OnMouseMoved(), mitk::SetRegionTool::OnMousePressed(), mitk::RegionGrowingTool::OnMousePressed(), mitk::RegionGrowingTool::OnMousePressedOutside(), mitk::ContourUtils::ProjectContourTo2DSlice(), RegionGrowing(), testIndexAndWorldConsistency(), and QmitkVtkLineProfileWidget::UpdateItemModelFromPath().
{
BackTransform(pt_mm, pt_units);
}
| void mitk::Geometry3D::WorldToIndex | ( | const mitk::Point3D & | pt_mm, |
| itk::Index< VIndexDimension > & | index | ||
| ) | const [inline] |
Convert world coordinates (in mm) of a point to index coordinates (in units). This method rounds to integer indices!
Definition at line 323 of file mitkGeometry3D.h.
{
typedef itk::Index<VIndexDimension> IndexType;
mitk::Point3D pt_units;
this->WorldToIndex(pt_mm, pt_units);
int i, dim=index.GetIndexDimension();
if(dim>3)
{
index.Fill(0);
dim=3;
}
for(i=0;i<dim;++i){
//index[i]=itk::Math::RoundHalfIntegerUp<typename IndexType::IndexValueType >( pt_units[i] );
index[i]=itk::Math::RoundHalfIntegerUp( pt_units[i] );
}
}
| void mitk::Geometry3D::WorldToIndex | ( | const mitk::Point3D & | atPt3d_mm, |
| const mitk::Vector3D & | vec_mm, | ||
| mitk::Vector3D & | vec_units | ||
| ) | const |
Convert world coordinates (in mm) of a vector vec_mm (at the point atPt3d_mm) to (continuous!) index coordinates (in units)
Definition at line 148 of file mitkGeometry3D.cpp.
{
BackTransform(atPt3d_mm, vec_mm, vec_units);
}
| void mitk::Geometry3D::WorldToItkPhysicalPoint | ( | const mitk::Point3D & | pt_mm, |
| itk::Point< TCoordRep, 3 > & | itkPhysicalPoint | ||
| ) | const [inline] |
Deprecated for use with ITK version 3.10 or newer. Convert world coordinates (in mm) of a point to ITK physical coordinates (in mm, but without a possible rotation)
This method is useful if you have want to access an mitk::Image via an itk::Image. ITK v3.8 and older did not support rotated (tilted) images, i.e., ITK images are always parallel to the coordinate axes. When accessing a (possibly rotated) mitk::Image via an itk::Image the rotational part of the transformation in the Geometry3D is simply discarded; in other word: only the origin and spacing is used by ITK, not the complete matrix available in MITK. With WorldToItkPhysicalPoint you can convert an MITK world coordinate (including the rotation) into a coordinate that can be used with the ITK image as a ITK physical coordinate (excluding the rotation).
Definition at line 357 of file mitkGeometry3D.h.
{
#if ((ITK_VERSION_MAJOR > 3) || (ITK_VERSION_MAJOR == 3 && ITK_VERSION_MINOR > 8))
mitk::vtk2itk(pt_mm, itkPhysicalPoint);
#else
mitk::Point3D index;
WorldToIndex(pt_mm, index);
for (unsigned int i = 0 ; i < 3 ; i++)
{
itkPhysicalPoint[i] = static_cast<TCoordRep>( this->m_Spacing[i] * index[i] + this->m_Origin[i] );
}
#endif
}
const std::string mitk::Geometry3D::INDEX_TO_NODE_TRANSFORM [static, protected] |
Definition at line 643 of file mitkGeometry3D.h.
const std::string mitk::Geometry3D::INDEX_TO_OBJECT_TRANSFORM [static, protected] |
Definition at line 641 of file mitkGeometry3D.h.
const std::string mitk::Geometry3D::INDEX_TO_WORLD_TRANSFORM [static, protected] |
Definition at line 644 of file mitkGeometry3D.h.
unsigned int mitk::Geometry3D::m_FrameOfReferenceID [protected] |
Definition at line 639 of file mitkGeometry3D.h.
bool mitk::Geometry3D::m_ImageGeometry [protected] |
Definition at line 630 of file mitkGeometry3D.h.
Referenced by InitializeGeometry().
mitk::BoundingBox::Pointer mitk::Geometry3D::m_ParametricBoundingBox [mutable, protected] |
Definition at line 624 of file mitkGeometry3D.h.
mitk::Vector3D mitk::Geometry3D::m_Spacing [protected] |
Spacing of the data. Only significant if the geometry describes an Image (m_ImageGeometry==true).
Definition at line 635 of file mitkGeometry3D.h.
mitk::TimeBounds mitk::Geometry3D::m_TimeBounds [mutable, protected] |
Definition at line 626 of file mitkGeometry3D.h.
Referenced by mitk::TimeSlicedGeometry::UpdateInformation().
bool mitk::Geometry3D::m_Valid [protected] |
Definition at line 637 of file mitkGeometry3D.h.
vtkMatrix4x4* mitk::Geometry3D::m_VtkMatrix [protected] |
Definition at line 628 of file mitkGeometry3D.h.
Referenced by Geometry3D().
const std::string mitk::Geometry3D::OBJECT_TO_NODE_TRANSFORM [static, protected] |
Definition at line 642 of file mitkGeometry3D.h.
 1.7.2
1.7.2

