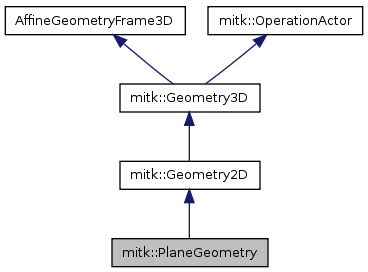
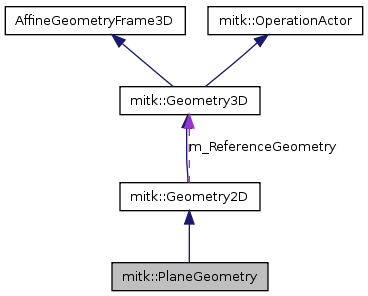
Describes a two-dimensional, rectangular plane. More...
#include <mitkPlaneGeometry.h>
Public Types | |
| enum | PlaneOrientation { Transversal, Sagittal, Frontal } |
| typedef PlaneGeometry | Self |
| typedef Geometry2D | Superclass |
| typedef itk::SmartPointer< Self > | Pointer |
| typedef itk::SmartPointer < const Self > | ConstPointer |
Public Member Functions | |
| virtual const char * | GetClassName () const |
| Method for creation through the object factory. | |
| virtual void | IndexToWorld (const Point2D &pt_units, Point2D &pt_mm) const |
| virtual void | WorldToIndex (const Point2D &pt_mm, Point2D &pt_units) const |
| virtual void | IndexToWorld (const Point2D &atPt2d_units, const Vector2D &vec_units, Vector2D &vec_mm) const |
| virtual void | WorldToIndex (const Point2D &atPt2d_mm, const Vector2D &vec_mm, Vector2D &vec_units) const |
| virtual void | Initialize () |
| Initialize the Geometry3D. | |
| virtual void | InitializeStandardPlane (const Geometry3D *geometry3D, PlaneOrientation planeorientation=Transversal, ScalarType zPosition=0, bool frontside=true, bool rotated=false) |
| Initialize a plane with orientation planeorientation (default: transversal) with respect to geometry3D (default: identity). Spacing also taken from geometry3D. | |
| virtual void | InitializeStandardPlane (const Geometry3D *geometry3D, bool top, PlaneOrientation planeorientation=Transversal, bool frontside=true, bool rotated=false) |
| Initialize a plane with orientation planeorientation (default: transversal) with respect to geometry3D (default: identity). Spacing also taken from geometry3D. | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const AffineTransform3D *transform=NULL, PlaneOrientation planeorientation=Transversal, ScalarType zPosition=0, bool frontside=true, bool rotated=false) |
| Initialize a plane with orientation planeorientation (default: transversal) with respect to transform (default: identity) given width and height in units. | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const Vector3D &spacing, PlaneOrientation planeorientation=Transversal, ScalarType zPosition=0, bool frontside=true, bool rotated=false) |
| Initialize plane with orientation planeorientation (default: transversal) given width, height and spacing. | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const Vector3D &rightVector, const Vector3D &downVector, const Vector3D *spacing=NULL) |
| Initialize plane by width and height in pixels, right-/down-vector (itk) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions). | |
| virtual void | InitializeStandardPlane (ScalarType width, ScalarType height, const VnlVector &rightVector, const VnlVector &downVector, const Vector3D *spacing=NULL) |
| Initialize plane by width and height in pixels, right-/down-vector (vnl) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions). | |
| virtual void | InitializeStandardPlane (const Vector3D &rightVector, const Vector3D &downVector, const Vector3D *spacing=NULL) |
| Initialize plane by right-/down-vector (itk) and spacing (default: 1.0 mm in all directions). | |
| virtual void | InitializeStandardPlane (const VnlVector &rightVector, const VnlVector &downVector, const Vector3D *spacing=NULL) |
| Initialize plane by right-/down-vector (vnl) and spacing (default: 1.0 mm in all directions). | |
| virtual void | InitializePlane (const Point3D &origin, const Vector3D &normal) |
| Initialize plane by origin and normal (size is 1.0 mm in all directions, direction of right-/down-vector valid but undefined). | |
| void | SetMatrixByVectors (const VnlVector &rightVector, const VnlVector &downVector, ScalarType thickness=1.0) |
| Initialize plane by right-/down-vector. | |
| Vector3D | GetNormal () const |
| Normal of the plane. | |
| VnlVector | GetNormalVnl () const |
| Normal of the plane as VnlVector. | |
| virtual ScalarType | SignedDistance (const Point3D &pt3d_mm) const |
| Signed distance of the point from the geometry (bounding-box not considered) | |
| virtual bool | IsAbove (const Point3D &pt3d_mm) const |
| Test if the point is above the geometry (bounding-box not considered) | |
| ScalarType | DistanceFromPlane (const Point3D &pt3d_mm) const |
| Distance of the point from the plane (bounding-box not considered) | |
| ScalarType | SignedDistanceFromPlane (const Point3D &pt3d_mm) const |
| Signed distance of the point from the plane (bounding-box not considered) | |
| ScalarType | DistanceFromPlane (const PlaneGeometry *plane) const |
| Distance of the plane from another plane (bounding-box not considered) | |
| ScalarType | SignedDistanceFromPlane (const PlaneGeometry *plane) const |
| Signed distance of the plane from another plane (bounding-box not considered) | |
| bool | IntersectionLine (const PlaneGeometry *plane, Line3D &crossline) const |
| Calculate the intersecting line of two planes. | |
| unsigned int | IntersectWithPlane2D (const PlaneGeometry *plane, Point2D &lineFrom, Point2D &lineTo) const |
| Calculate two points where another plane intersects the border of this plane. | |
| double | Angle (const PlaneGeometry *plane) const |
| Calculate the angle between two planes. | |
| double | Angle (const Line3D &line) const |
| Calculate the angle between the plane and a line. | |
| bool | IntersectionPoint (const Line3D &line, Point3D &intersectionPoint) const |
| Calculate intersection point between the plane and a line. | |
| bool | IntersectionPointParam (const Line3D &line, double &t) const |
| Calculate line parameter of intersection point between the plane and a line. | |
| bool | IsParallel (const PlaneGeometry *plane) const |
| Returns whether the plane is parallel to another plane. | |
| bool | IsOnPlane (const Point3D &point) const |
| Returns whether the point is on the plane (bounding-box not considered) | |
| bool | IsOnPlane (const Line3D &line) const |
| Returns whether the line is on the plane (bounding-box not considered) | |
| bool | IsOnPlane (const PlaneGeometry *plane) const |
| Returns whether the plane is on the plane (bounding-box not considered) | |
| Point3D | ProjectPointOntoPlane (const Point3D &pt) const |
| Returns the lot from the point to the plane. | |
| virtual void | SetIndexToWorldTransform (AffineTransform3D *transform) |
| virtual void | SetBounds (const BoundingBox::BoundsArrayType &bounds) |
| AffineGeometryFrame3D::Pointer | Clone () const |
| clones the geometry | |
| virtual void | ExecuteOperation (Operation *operation) |
Static Public Member Functions | |
| static Pointer | New () |
| static void | EnsurePerpendicularNormal (AffineTransform3D *transform) |
| Change transform so that the third column of the transform-martix is perpendicular to the first two columns. | |
Protected Member Functions | |
| PlaneGeometry () | |
| virtual | ~PlaneGeometry () |
| virtual void | InitializeGeometry (Self *newGeometry) const |
| virtual void | PrintSelf (std::ostream &os, itk::Indent indent) const |
Describes a two-dimensional, rectangular plane.
Definition at line 39 of file mitkPlaneGeometry.h.
| typedef itk::SmartPointer<const Self> mitk::PlaneGeometry::ConstPointer |
Reimplemented from mitk::Geometry2D.
Definition at line 42 of file mitkPlaneGeometry.h.
| typedef itk::SmartPointer<Self> mitk::PlaneGeometry::Pointer |
Reimplemented from mitk::Geometry2D.
Definition at line 42 of file mitkPlaneGeometry.h.
Reimplemented from mitk::Geometry2D.
Definition at line 42 of file mitkPlaneGeometry.h.
Reimplemented from mitk::Geometry2D.
Definition at line 42 of file mitkPlaneGeometry.h.
Definition at line 47 of file mitkPlaneGeometry.h.
{ Transversal, Sagittal, Frontal };
| mitk::PlaneGeometry::PlaneGeometry | ( | ) | [protected] |
Definition at line 25 of file mitkPlaneGeometry.cpp.
{
| mitk::PlaneGeometry::~PlaneGeometry | ( | ) | [protected, virtual] |
Definition at line 31 of file mitkPlaneGeometry.cpp.
{
| double mitk::PlaneGeometry::Angle | ( | const PlaneGeometry * | plane ) | const |
Calculate the angle between two planes.
Definition at line 576 of file mitkPlaneGeometry.cpp.
Referenced by IsOnPlane().
| double mitk::PlaneGeometry::Angle | ( | const Line3D & | line ) | const |
Calculate the angle between the plane and a line.
Definition at line 582 of file mitkPlaneGeometry.cpp.
References mitk::Geometry3D::GetMatrixColumn().
{
return angle(plane->GetMatrixColumn(2), GetMatrixColumn(2));
}
| AffineGeometryFrame3D::Pointer mitk::PlaneGeometry::Clone | ( | ) | const [virtual] |
clones the geometry
Overwrite in all sub-classes. Normally looks like:
//## Self::Pointer newGeometry = Self::New(); //## newGeometry->Initialize(); //## InitializeGeometry(newGeometry); //## return newGeometry.GetPointer(); //##
Reimplemented from mitk::Geometry2D.
Definition at line 674 of file mitkPlaneGeometry.cpp.
References GetNormal(), GetNormalVnl(), and SignedDistanceFromPlane().
Referenced by mitk::SlicedGeometry3D::GetGeometry2D(), mitk::PlanesPerpendicularToLinesFilter::SetPlane(), and mitk::AbstractTransformGeometry::SetPlane().
{
ScalarType len = this->GetNormalVnl().two_norm();
return pt - this->GetNormal() * this->SignedDistanceFromPlane( pt ) / len;
}
AffineGeometryFrame3D::Pointer
| ScalarType mitk::PlaneGeometry::DistanceFromPlane | ( | const Point3D & | pt3d_mm ) | const |
Distance of the point from the plane (bounding-box not considered)
Definition at line 499 of file mitkPlaneGeometry.cpp.
References itk::AffineGeometryFrame< TScalarType, NDimensions >::m_IndexToWorldTransform.
Referenced by mitk::PlanarFigureMapper2D::Paint(), and mitk::SlicesRotator::RotateToPoint().
{
return m_IndexToWorldTransform
->GetMatrix().GetVnlMatrix().get_column(2);
}
| ScalarType mitk::PlaneGeometry::DistanceFromPlane | ( | const PlaneGeometry * | plane ) | const [inline] |
Distance of the plane from another plane (bounding-box not considered)
Result is 0 if planes are not parallel.
Definition at line 243 of file mitkPlaneGeometry.h.
{
return fabs(SignedDistanceFromPlane(plane));
}
| void mitk::PlaneGeometry::EnsurePerpendicularNormal | ( | mitk::AffineTransform3D * | transform ) | [static] |
Change transform so that the third column of the transform-martix is perpendicular to the first two columns.
Definition at line 44 of file mitkPlaneGeometry.cpp.
References mitk::Geometry3D::Initialize().
{
Superclass::Initialize();
}
void
PlaneGeometry::EnsurePerpendicularNormal(mitk::AffineTransform3D *transform)
{
//ensure row(2) of transform to be perpendicular to plane, keep length.
VnlVector normal = vnl_cross_3d(
transform->GetMatrix().GetVnlMatrix().get_column(0),
transform->GetMatrix().GetVnlMatrix().get_column(1) );
normal.normalize();
ScalarType len = transform->GetMatrix()
.GetVnlMatrix().get_column(2).two_norm();
| void mitk::PlaneGeometry::ExecuteOperation | ( | Operation * | operation ) | [virtual] |
Implements operation to re-orient the plane
Reimplemented from mitk::Geometry3D.
Definition at line 684 of file mitkPlaneGeometry.cpp.
{
vtkTransform *transform = vtkTransform::New();
transform->SetMatrix( m_VtkMatrix );
switch ( operation->GetOperationType() )
{
case OpORIENT:
{
mitk::PlaneOperation *planeOp = dynamic_cast< mitk::PlaneOperation * >( operation );
if ( planeOp == NULL )
{
return;
}
Point3D center = planeOp->GetPoint();
Vector3D orientationVector = planeOp->GetNormal();
Vector3D defaultVector;
FillVector3D( defaultVector, 0.0, 0.0, 1.0 );
Vector3D rotationAxis = itk::CrossProduct( orientationVector, defaultVector );
//vtkFloatingPointType rotationAngle = acos( orientationVector[2] / orientationVector.GetNorm() );
vtkFloatingPointType rotationAngle = atan2( (double) rotationAxis.GetNorm(), (double) (orientationVector * defaultVector) );
rotationAngle *= 180.0 / vnl_math::pi;
transform->PostMultiply();
transform->Identity();
transform->Translate( center[0], center[1], center[2] );
transform->RotateWXYZ( rotationAngle, rotationAxis[0], rotationAxis[1], rotationAxis[2] );
transform->Translate( -center[0], -center[1], -center[2] );
break;
}
default:
Superclass::ExecuteOperation( operation );
transform->Delete();
return;
| virtual const char* mitk::PlaneGeometry::GetClassName | ( | ) | const [virtual] |
Method for creation through the object factory.
Reimplemented from mitk::Geometry2D.
| Vector3D mitk::PlaneGeometry::GetNormal | ( | ) | const |
Normal of the plane.
Definition at line 480 of file mitkPlaneGeometry.cpp.
Referenced by Clone(), mitk::SegTool2D::DetermineAffectedImageSlice(), mitk::SlicedGeometry3D::ExecuteOperation(), mitk::ImageMapperGL2D::GenerateData(), mitk::ExtractDirectedPlaneImageFilter::GenerateData(), mitk::SlicedGeometry3D::GetGeometry2D(), and mitk::SlicedGeometry3D::ReinitializePlanes().
{
| VnlVector mitk::PlaneGeometry::GetNormalVnl | ( | ) | const |
Normal of the plane as VnlVector.
Definition at line 491 of file mitkPlaneGeometry.cpp.
Referenced by Clone().
| void mitk::PlaneGeometry::IndexToWorld | ( | const Point2D & | atPt2d_units, |
| const Vector2D & | vec_units, | ||
| Vector2D & | vec_mm | ||
| ) | const [virtual] |
Definition at line 101 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::m_ScaleFactorMMPerUnitX, and mitk::Geometry2D::m_ScaleFactorMMPerUnitY.
{
pt_units[0]=pt_mm[0]*(1.0/m_ScaleFactorMMPerUnitX);
pt_units[1]=pt_mm[1]*(1.0/m_ScaleFactorMMPerUnitY);
}
| void mitk::PlaneGeometry::IndexToWorld | ( | const Point2D & | pt_units, |
| Point2D & | pt_mm | ||
| ) | const [virtual] |
Definition at line 87 of file mitkPlaneGeometry.cpp.
Referenced by mappingTests2D().
| void mitk::PlaneGeometry::Initialize | ( | ) | [virtual] |
Initialize the Geometry3D.
Reimplemented from mitk::Geometry3D.
Definition at line 37 of file mitkPlaneGeometry.cpp.
{
}
| void mitk::PlaneGeometry::InitializeGeometry | ( | Self * | newGeometry ) | const [protected, virtual] |
Reimplemented from mitk::Geometry2D.
Definition at line 733 of file mitkPlaneGeometry.cpp.
| void mitk::PlaneGeometry::InitializePlane | ( | const Point3D & | origin, |
| const Vector3D & | normal | ||
| ) | [virtual] |
Initialize plane by origin and normal (size is 1.0 mm in all directions, direction of right-/down-vector valid but undefined).
Definition at line 437 of file mitkPlaneGeometry.cpp.
{
VnlVector rightVectorVnl(3), downVectorVnl;
if( Equal( normal[1], 0.0f ) == false )
{
FillVector3D( rightVectorVnl, 1.0f, -normal[0]/normal[1], 0.0f );
rightVectorVnl.normalize();
}
else
{
FillVector3D( rightVectorVnl, 0.0f, 1.0f, 0.0f );
}
| void mitk::PlaneGeometry::InitializeStandardPlane | ( | const Geometry3D * | geometry3D, |
| PlaneOrientation | planeorientation = Transversal, |
||
| ScalarType | zPosition = 0, |
||
| bool | frontside = true, |
||
| bool | rotated = false |
||
| ) | [virtual] |
Initialize a plane with orientation planeorientation (default: transversal) with respect to geometry3D (default: identity). Spacing also taken from geometry3D.
// for in-plane unit spacing: thisgeometry->SetSizeInUnits(thisgeometry->GetExtentInMM(0), thisgeometry->GetExtentInMM(1)); // additionally, for unit spacing in normal direction (former version // did not do this): thisgeometry->SetExtentInMM(2, 1.0);
Definition at line 288 of file mitkPlaneGeometry.cpp.
Referenced by InitializeStandardPlane().
{
this->SetReferenceGeometry( const_cast< Geometry3D * >( geometry3D ) );
ScalarType width, height;
const BoundingBox::BoundsArrayType& boundsarray =
geometry3D->GetBoundingBox()->GetBounds();
Vector3D originVector;
FillVector3D(originVector, boundsarray[0], boundsarray[2], boundsarray[4]);
if(geometry3D->GetImageGeometry())
{
FillVector3D( originVector,
originVector[0] - 0.5,
originVector[1] - 0.5,
originVector[2] - 0.5 );
}
switch(planeorientation)
{
case Transversal:
width = geometry3D->GetExtent(0);
height = geometry3D->GetExtent(1);
break;
case Frontal:
width = geometry3D->GetExtent(0);
height = geometry3D->GetExtent(2);
break;
case Sagittal:
width = geometry3D->GetExtent(1);
height = geometry3D->GetExtent(2);
break;
default:
itkExceptionMacro("unknown PlaneOrientation");
}
InitializeStandardPlane( width, height,
geometry3D->GetIndexToWorldTransform(),
planeorientation, zPosition, frontside, rotated );
ScalarType bounds[6]= { 0, width, 0, height, 0, 1 };
this->SetBounds( bounds );
| void mitk::PlaneGeometry::InitializeStandardPlane | ( | const Geometry3D * | geometry3D, |
| bool | top, | ||
| PlaneOrientation | planeorientation = Transversal, |
||
| bool | frontside = true, |
||
| bool | rotated = false |
||
| ) | [virtual] |
Initialize a plane with orientation planeorientation (default: transversal) with respect to geometry3D (default: identity). Spacing also taken from geometry3D.
| top | if true, create plane at top, otherwise at bottom (for PlaneOrientation Transversal, for other plane locations respectively) |
Definition at line 343 of file mitkPlaneGeometry.cpp.
{
ScalarType zPosition;
switch(planeorientation)
{
case Transversal:
zPosition = (top ? 0.5 : geometry3D->GetExtent(2)-1+0.5);
break;
case Frontal:
zPosition = (top ? 0.5 : geometry3D->GetExtent(1)-1+0.5);
break;
case Sagittal:
zPosition = (top ? 0.5 : geometry3D->GetExtent(0)-1+0.5);
break;
| virtual void mitk::PlaneGeometry::InitializeStandardPlane | ( | ScalarType | width, |
| ScalarType | height, | ||
| const AffineTransform3D * | transform = NULL, |
||
| PlaneOrientation | planeorientation = Transversal, |
||
| ScalarType | zPosition = 0, |
||
| bool | frontside = true, |
||
| bool | rotated = false |
||
| ) | [virtual] |
Initialize a plane with orientation planeorientation (default: transversal) with respect to transform (default: identity) given width and height in units.
| virtual void mitk::PlaneGeometry::InitializeStandardPlane | ( | ScalarType | width, |
| ScalarType | height, | ||
| const Vector3D & | spacing, | ||
| PlaneOrientation | planeorientation = Transversal, |
||
| ScalarType | zPosition = 0, |
||
| bool | frontside = true, |
||
| bool | rotated = false |
||
| ) | [virtual] |
Initialize plane with orientation planeorientation (default: transversal) given width, height and spacing.
| virtual void mitk::PlaneGeometry::InitializeStandardPlane | ( | ScalarType | width, |
| ScalarType | height, | ||
| const Vector3D & | rightVector, | ||
| const Vector3D & | downVector, | ||
| const Vector3D * | spacing = NULL |
||
| ) | [virtual] |
Initialize plane by width and height in pixels, right-/down-vector (itk) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions).
The vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
| virtual void mitk::PlaneGeometry::InitializeStandardPlane | ( | ScalarType | width, |
| ScalarType | height, | ||
| const VnlVector & | rightVector, | ||
| const VnlVector & | downVector, | ||
| const Vector3D * | spacing = NULL |
||
| ) | [virtual] |
Initialize plane by width and height in pixels, right-/down-vector (vnl) to describe orientation in world-space (vectors will be normalized) and spacing (default: 1.0 mm in all directions).
The vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
| void mitk::PlaneGeometry::InitializeStandardPlane | ( | const Vector3D & | rightVector, |
| const Vector3D & | downVector, | ||
| const Vector3D * | spacing = NULL |
||
| ) | [virtual] |
Initialize plane by right-/down-vector (itk) and spacing (default: 1.0 mm in all directions).
The length of the right-/-down-vector is used as width/height in units, respectively. Then, the vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
Definition at line 369 of file mitkPlaneGeometry.cpp.
| void mitk::PlaneGeometry::InitializeStandardPlane | ( | const VnlVector & | rightVector, |
| const VnlVector & | downVector, | ||
| const Vector3D * | spacing = NULL |
||
| ) | [virtual] |
Initialize plane by right-/down-vector (vnl) and spacing (default: 1.0 mm in all directions).
The length of the right-/-down-vector is used as width/height in units, respectively. Then, the vectors are normalized and multiplied by the respective spacing before they are set in the matrix.
Definition at line 378 of file mitkPlaneGeometry.cpp.
References InitializeStandardPlane().
{
InitializeStandardPlane( rightVector.Get_vnl_vector(),
downVector.Get_vnl_vector(), spacing );
}
void
PlaneGeometry::InitializeStandardPlane( const VnlVector& rightVector,
| bool mitk::PlaneGeometry::IntersectionLine | ( | const PlaneGeometry * | plane, |
| Line3D & | crossline | ||
| ) | const |
Calculate the intersecting line of two planes.
Definition at line 520 of file mitkPlaneGeometry.cpp.
References SignedDistanceFromPlane().
Referenced by QmitkBoundingObjectWidget::CreateBoundingObject(), mitk::SlicesRotator::ExecuteAction(), QmitkStdMultiWidget::GetCrossPosition(), mitk::Geometry2DDataMapper2D::Paint(), and mitk::SlicesRotator::RotateToPoint().
{
return SignedDistanceFromPlane(pt3d_mm) > 0;
}
bool
PlaneGeometry::IntersectionLine(
const PlaneGeometry* plane, Line3D& crossline ) const
{
Vector3D normal = this->GetNormal();
normal.Normalize();
Vector3D planeNormal = plane->GetNormal();
planeNormal.Normalize();
Vector3D direction = itk::CrossProduct( normal, planeNormal );
if ( direction.GetSquaredNorm() < eps )
return false;
crossline.SetDirection( direction );
double N1dN2 = normal * planeNormal;
double determinant = 1.0 - N1dN2 * N1dN2;
Vector3D origin = this->GetOrigin().GetVectorFromOrigin();
Vector3D planeOrigin = plane->GetOrigin().GetVectorFromOrigin();
double d1 = normal * origin;
double d2 = planeNormal * planeOrigin;
double c1 = ( d1 - d2 * N1dN2 ) / determinant;
| bool mitk::PlaneGeometry::IntersectionPoint | ( | const Line3D & | line, |
| Point3D & | intersectionPoint | ||
| ) | const |
Calculate intersection point between the plane and a line.
| intersectionPoint | intersection point |
Definition at line 589 of file mitkPlaneGeometry.cpp.
References mitk::Line< TCoordRep, NPointDimension >::GetDirection(), and mitk::Geometry3D::GetMatrixColumn().
Referenced by mitk::PlaneCutFilter::_computeIntersection(), QmitkBoundingObjectWidget::CreateBoundingObject(), mitk::SlicesRotator::ExecuteAction(), QmitkStdMultiWidget::GetCrossPosition(), and mitk::SlicesRotator::RotateToPoint().
{
return vnl_math::pi_over_2
- angle( line.GetDirection().Get_vnl_vector(), GetMatrixColumn(2) );
}
bool PlaneGeometry::IntersectionPoint(
const Line3D &line, Point3D &intersectionPoint ) const
{
Vector3D planeNormal = this->GetNormal();
planeNormal.Normalize();
Vector3D lineDirection = line.GetDirection();
lineDirection.Normalize();
double t = planeNormal * lineDirection;
if ( fabs( t ) < eps )
{
return false;
}
| bool mitk::PlaneGeometry::IntersectionPointParam | ( | const Line3D & | line, |
| double & | t | ||
| ) | const |
Calculate line parameter of intersection point between the plane and a line.
| t | parameter of line: intersection point is line.GetPoint()+t*line.GetDirection() |
Definition at line 614 of file mitkPlaneGeometry.cpp.
| unsigned int mitk::PlaneGeometry::IntersectWithPlane2D | ( | const PlaneGeometry * | plane, |
| Point2D & | lineFrom, | ||
| Point2D & | lineTo | ||
| ) | const |
Calculate two points where another plane intersects the border of this plane.
Definition at line 556 of file mitkPlaneGeometry.cpp.
{
Line3D crossline;
if ( this->IntersectionLine( plane, crossline ) == false )
return 0;
Point2D point2;
Vector2D direction2;
this->Map( crossline.GetPoint(), point2 );
| bool mitk::PlaneGeometry::IsAbove | ( | const Point3D & | pt3d_mm ) | const [virtual] |
Test if the point is above the geometry (bounding-box not considered)
Reimplemented from mitk::Geometry2D.
Definition at line 513 of file mitkPlaneGeometry.cpp.
References SignedDistanceFromPlane().
Referenced by mitk::PlaneCutFilter::_computeIntersection().
{
return SignedDistanceFromPlane(pt3d_mm);
}
| bool mitk::PlaneGeometry::IsOnPlane | ( | const Point3D & | point ) | const |
Returns whether the point is on the plane (bounding-box not considered)
Definition at line 644 of file mitkPlaneGeometry.cpp.
References Angle().
| bool mitk::PlaneGeometry::IsOnPlane | ( | const Line3D & | line ) | const |
Returns whether the line is on the plane (bounding-box not considered)
Definition at line 651 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::Distance().
{
return Distance(point) < eps;
}
| bool mitk::PlaneGeometry::IsOnPlane | ( | const PlaneGeometry * | plane ) | const |
Returns whether the plane is on the plane (bounding-box not considered)
Definition at line 659 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::Distance(), mitk::Line< TCoordRep, NPointDimension >::GetPoint(), and mitk::Line< TCoordRep, NPointDimension >::GetPoint2().
| bool mitk::PlaneGeometry::IsParallel | ( | const PlaneGeometry * | plane ) | const |
Returns whether the plane is parallel to another plane.
Definition at line 637 of file mitkPlaneGeometry.cpp.
Referenced by mitk::PlanarFigureMapper2D::Paint(), and ProjectPointOntoPlane().
| static Pointer mitk::PlaneGeometry::New | ( | ) | [static] |
Method for creation through the object factory.
Reimplemented from mitk::Geometry2D.
Referenced by mitk::BaseRenderer::BaseRenderer(), PlanarFigureIOTestClass::CreatePlanarFigures(), mitk::PointSetToCurvedGeometryFilter::GenerateData(), mitk::PlanarFigureReader::GenerateData(), mitk::ExtractImageFilter::GenerateData(), mitk::PlaneFit::GenerateOutputInformation(), mitk::Image::Initialize(), mitk::PicHelper::InitializeEvenlySpaced(), mitk::SlicedGeometry3D::InitializePlanes(), mitkAbstractTransformGeometryTest(), mitkGeometryDataToSurfaceFilterTest(), mitkImageTest(), mitkImageToItkTest(), mitkPlanarArrowTest(), mitkPlanarCrossTest(), mitkPlanarPolygonTest(), mitkPlaneGeometryTest(), mitkSlicedGeometry3DTest(), mitkSliceNavigationControllerTest(), mitkTimeSlicedGeometryTest(), mitkVtkAbstractTransformPlaneGeometryTest(), mitk::SlicedData::SetGeometry(), mitk::PicHelper::SetGeometry2D(), mitk::PlaneFit::SetInput(), mitk::SlicedGeometry3D::SetSpacing(), mitk::BaseRenderer::SetWorldGeometry(), TestCase1210(), and TestProjectPointOntoPlane().
| void mitk::PlaneGeometry::PrintSelf | ( | std::ostream & | os, |
| itk::Indent | indent | ||
| ) | const [protected, virtual] |
Reimplemented from mitk::Geometry2D.
Definition at line 739 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::InitializeGeometry().
{
Superclass::InitializeGeometry(newGeometry);
}
| Point3D mitk::PlaneGeometry::ProjectPointOntoPlane | ( | const Point3D & | pt ) | const |
Returns the lot from the point to the plane.
Definition at line 666 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::Distance(), mitk::Geometry3D::GetOrigin(), and IsParallel().
{
return ( IsParallel( plane ) && (Distance( plane->GetOrigin() ) < eps) );
}
| void mitk::PlaneGeometry::SetBounds | ( | const BoundingBox::BoundsArrayType & | bounds ) | [virtual] |
Definition at line 73 of file mitkPlaneGeometry.cpp.
{
//currently the unit rectangle must be starting at the origin [0,0]
assert(bounds[0]==0);
| void mitk::PlaneGeometry::SetIndexToWorldTransform | ( | mitk::AffineTransform3D * | transform ) | [virtual] |
Reimplemented from mitk::Geometry2D.
Definition at line 64 of file mitkPlaneGeometry.cpp.
| void mitk::PlaneGeometry::SetMatrixByVectors | ( | const VnlVector & | rightVector, |
| const VnlVector & | downVector, | ||
| ScalarType | thickness = 1.0 |
||
| ) |
Initialize plane by right-/down-vector.
Definition at line 461 of file mitkPlaneGeometry.cpp.
{
VnlVector normal = vnl_cross_3d(rightVector, downVector);
normal.normalize();
normal *= thickness;
AffineTransform3D::Pointer transform = AffineTransform3D::New();
Matrix3D matrix;
| ScalarType mitk::PlaneGeometry::SignedDistance | ( | const Point3D & | pt3d_mm ) | const [virtual] |
Signed distance of the point from the geometry (bounding-box not considered)
Reimplemented from mitk::Geometry2D.
Definition at line 506 of file mitkPlaneGeometry.cpp.
{
return fabs(SignedDistance( pt3d_mm ));
}
| ScalarType mitk::PlaneGeometry::SignedDistanceFromPlane | ( | const Point3D & | pt3d_mm ) | const [inline] |
Signed distance of the point from the plane (bounding-box not considered)
> 0 : point is in the direction of the direction vector.
Definition at line 226 of file mitkPlaneGeometry.h.
Referenced by Clone(), IntersectionLine(), IsAbove(), and mitk::SlicedGeometry3D::ReinitializePlanes().
{
ScalarType len = GetNormalVnl().two_norm();
if( len == 0 )
return 0;
return (pt3d_mm-GetOrigin())*GetNormal() / len;
}
| ScalarType mitk::PlaneGeometry::SignedDistanceFromPlane | ( | const PlaneGeometry * | plane ) | const [inline] |
Signed distance of the plane from another plane (bounding-box not considered)
Result is 0 if planes are not parallel.
Definition at line 255 of file mitkPlaneGeometry.h.
References mitk::Geometry3D::GetOrigin().
{
if(IsParallel(plane))
{
return SignedDistance(plane->GetOrigin());
}
return 0;
}
| void mitk::PlaneGeometry::WorldToIndex | ( | const Point2D & | atPt2d_mm, |
| const Vector2D & | vec_mm, | ||
| Vector2D & | vec_units | ||
| ) | const [virtual] |
Definition at line 110 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::m_ScaleFactorMMPerUnitX, and mitk::Geometry2D::m_ScaleFactorMMPerUnitY.
{
vec_mm[0] = m_ScaleFactorMMPerUnitX * vec_units[0];
vec_mm[1] = m_ScaleFactorMMPerUnitY * vec_units[1];
}
| void mitk::PlaneGeometry::WorldToIndex | ( | const Point2D & | pt_mm, |
| Point2D & | pt_units | ||
| ) | const [virtual] |
Definition at line 94 of file mitkPlaneGeometry.cpp.
References mitk::Geometry2D::m_ScaleFactorMMPerUnitX, and mitk::Geometry2D::m_ScaleFactorMMPerUnitY.
Referenced by mappingTests2D().
{
pt_mm[0]=m_ScaleFactorMMPerUnitX*pt_units[0];
pt_mm[1]=m_ScaleFactorMMPerUnitY*pt_units[1];
}
 1.7.2
1.7.2

